 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImmersive Virtual Reality and Robotics for Upper Extremity Rehabilitation
Apr 21, 2023Stroke patients often experience upper limb impairments that restrict their mobility and daily activities. Physical therapy (PT) is the most effective method to improve impairments, but low patient adherence and participation in PT exercises pose significant challenges. To overcome these barriers, a combination of virtual reality (VR) and robotics in PT is promising. However, few systems effectively integrate VR with robotics, especially for upper limb rehabilitation. Additionally, traditional VR rehabilitation primarily focuses on hand movements rather than joint movements of the limb. This work introduces a new virtual rehabilitation solution that combines VR with KinArm robotics and a wearable elbow sensor to measure elbow joint movements. The framework also enhances the capabilities of a traditional robotic device (KinArm) used for motor dysfunction assessment and rehabilitation. A preliminary study with non-clinical participants (n = 16) was conducted to evaluate the effectiveness and usability of the proposed VR framework. We used a two-way repeated measures experimental design where participants performed two tasks (Circle and Diamond) with two conditions (VR and VR KinArm). We found no main effect of the conditions for task completion time. However, there were significant differences in both the normalized number of mistakes and recorded elbow joint angles (captured as resistance change values from the wearable sensor) between the Circle and Diamond tasks. Additionally, we report the system usability, task load, and presence in the proposed VR framework. This system demonstrates the potential advantages of an immersive, multi-sensory approach and provides future avenues for research in developing more cost-effective, tailored, and personalized upper limb solutions for home therapy applications.
Human-centered manipulation and navigation with Robot DE NIRO
Oct 23, 2018
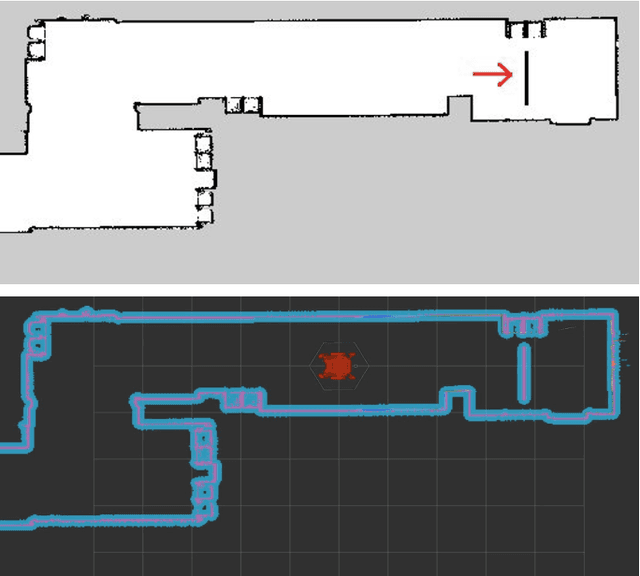

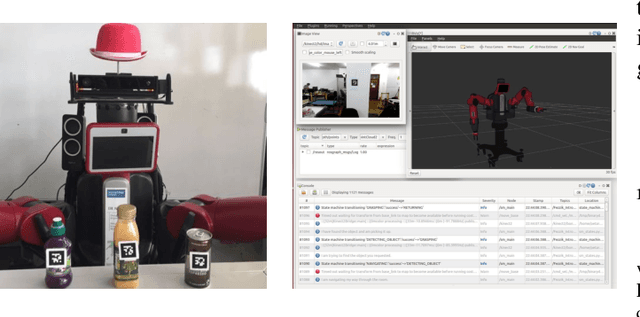
Social assistance robots in health and elderly care have the potential to support and ease human lives. Given the macrosocial trends of aging and long-lived populations, robotics-based care research mainly focused on helping the elderly live independently. In this paper, we introduce Robot DE NIRO, a research platform that aims to support the supporter (the caregiver) and also offers direct human-robot interaction for the care recipient. Augmented by several sensors, DE NIRO is capable of complex manipulation tasks. It reliably interacts with humans and can autonomously and swiftly navigate through dynamically changing environments. We describe preliminary experiments in a demonstrative scenario and discuss DE NIRO's design and capabilities. We put particular emphases on safe, human-centered interaction procedures implemented in both hardware and software, including collision avoidance in manipulation and navigation as well as an intuitive perception stack through speech and face recognition.