 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEEG-based Texture Roughness Classification in Active Tactile Exploration with Invariant Representation Learning Networks
Mar 05, 2021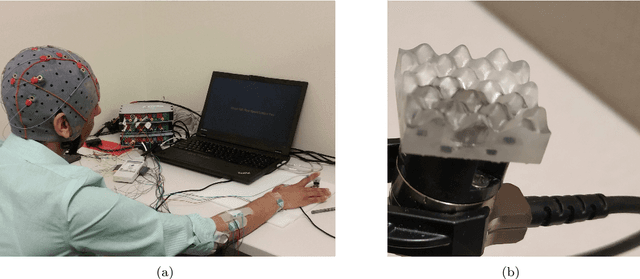
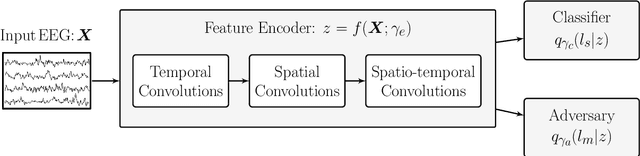
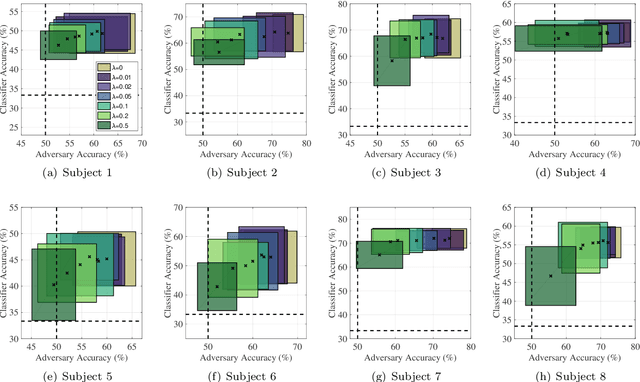
During daily activities, humans use their hands to grasp surrounding objects and perceive sensory information which are also employed for perceptual and motor goals. Multiple cortical brain regions are known to be responsible for sensory recognition, perception and motor execution during sensorimotor processing. While various research studies particularly focus on the domain of human sensorimotor control, the relation and processing between motor execution and sensory processing is not yet fully understood. Main goal of our work is to discriminate textured surfaces varying in their roughness levels during active tactile exploration using simultaneously recorded electroencephalogram (EEG) data, while minimizing the variance of distinct motor exploration movement patterns. We perform an experimental study with eight healthy participants who were instructed to use the tip of their dominant hand index finger while rubbing or tapping three different textured surfaces with varying levels of roughness. We use an adversarial invariant representation learning neural network architecture that performs EEG-based classification of different textured surfaces, while simultaneously minimizing the discriminability of motor movement conditions (i.e., rub or tap). Results show that the proposed approach can discriminate between three different textured surfaces with accuracies up to 70%, while suppressing movement related variability from learned representations.