 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring Failure Cases in Multimodal Reasoning About Physical Dynamics
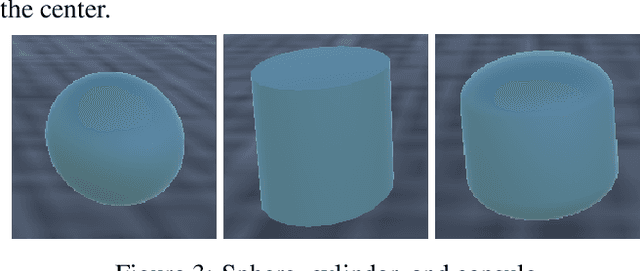
Feb 24, 2024In this paper, we present an exploration of LLMs' abilities to problem solve with physical reasoning in situated environments. We construct a simple simulated environment and demonstrate examples of where, in a zero-shot setting, both text and multimodal LLMs display atomic world knowledge about various objects but fail to compose this knowledge in correct solutions for an object manipulation and placement task. We also use BLIP, a vision-language model trained with more sophisticated cross-modal attention, to identify cases relevant to object physical properties that that model fails to ground. Finally, we present a procedure for discovering the relevant properties of objects in the environment and propose a method to distill this knowledge back into the LLM.
Combining Automatic Coding and Instructor Input to Generate ENA Visualizations for Asynchronous Online Discussion
Aug 22, 2023



Asynchronous online discussions are a common fundamental tool to facilitate social interaction in hybrid and online courses. However, instructors lack the tools to accomplish the overwhelming task of evaluating asynchronous online discussion activities. In this paper we present an approach that uses Latent Dirichlet Analysis (LDA) and the instructor's keywords to automatically extract codes from a relatively small dataset. We use the generated codes to build an Epistemic Network Analysis (ENA) model and compare this model with a previous ENA model built by human coders. The results show that there is no statistical difference between the two models. We present an analysis of these models and discuss the potential use of ENA as a visualization to help instructors evaluating asynchronous online discussions.
Grounding and Distinguishing Conceptual Vocabulary Through Similarity Learning in Embodied Simulations
May 23, 2023We present a novel method for using agent experiences gathered through an embodied simulation to ground contextualized word vectors to object representations. We use similarity learning to make comparisons between different object types based on their properties when interacted with, and to extract common features pertaining to the objects' behavior. We then use an affine transformation to calculate a projection matrix that transforms contextualized word vectors from different transformer-based language models into this learned space, and evaluate whether new test instances of transformed token vectors identify the correct concept in the object embedding space. Our results expose properties of the embedding spaces of four different transformer models and show that grounding object token vectors is usually more helpful to grounding verb and attribute token vectors than the reverse, which reflects earlier conclusions in the analogical reasoning and psycholinguistic literature.
Detecting and Accommodating Novel Types and Concepts in an Embodied Simulation Environment
Nov 08, 2022



In this paper, we present methods for two types of metacognitive tasks in an AI system: rapidly expanding a neural classification model to accommodate a new category of object, and recognizing when a novel object type is observed instead of misclassifying the observation as a known class. Our methods take numerical data drawn from an embodied simulation environment, which describes the motion and properties of objects when interacted with, and we demonstrate that this type of representation is important for the success of novel type detection. We present a suite of experiments in rapidly accommodating the introduction of new categories and concepts and in novel type detection, and an architecture to integrate the two in an interactive system.
Automated Code Extraction from Discussion Board Text Dataset
Oct 31, 2022



This study introduces and investigates the capabilities of three different text mining approaches, namely Latent Semantic Analysis, Latent Dirichlet Analysis, and Clustering Word Vectors, for automating code extraction from a relatively small discussion board dataset. We compare the outputs of each algorithm with a previous dataset that was manually coded by two human raters. The results show that even with a relatively small dataset, automated approaches can be an asset to course instructors by extracting some of the discussion codes, which can be used in Epistemic Network Analysis.
Exploiting Embodied Simulation to Detect Novel Object Classes Through Interaction
Apr 17, 2022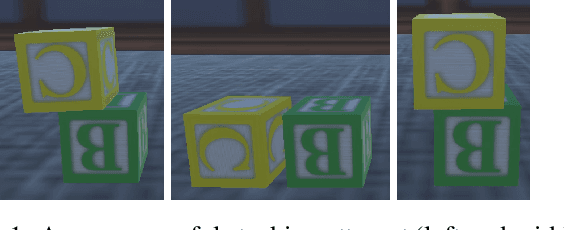


In this paper we present a novel method for a naive agent to detect novel objects it encounters in an interaction. We train a reinforcement learning policy on a stacking task given a known object type, and then observe the results of the agent attempting to stack various other objects based on the same trained policy. By extracting embedding vectors from a convolutional neural net trained over the results of the aforementioned stacking play, we can determine the similarity of a given object to known object types, and determine if the given object is likely dissimilar enough to the known types to be considered a novel class of object. We present the results of this method on two datasets gathered using two different policies and demonstrate what information the agent needs to extract from its environment to make these novelty judgments.