 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscriminating Original Region from Duplicated One in Copy-Move Forgery
Mar 17, 2019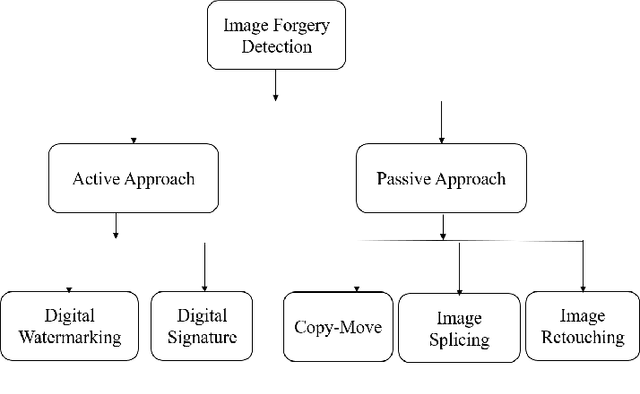
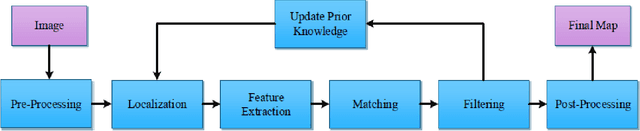
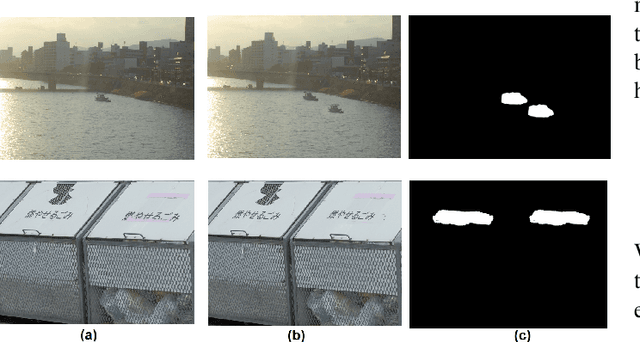
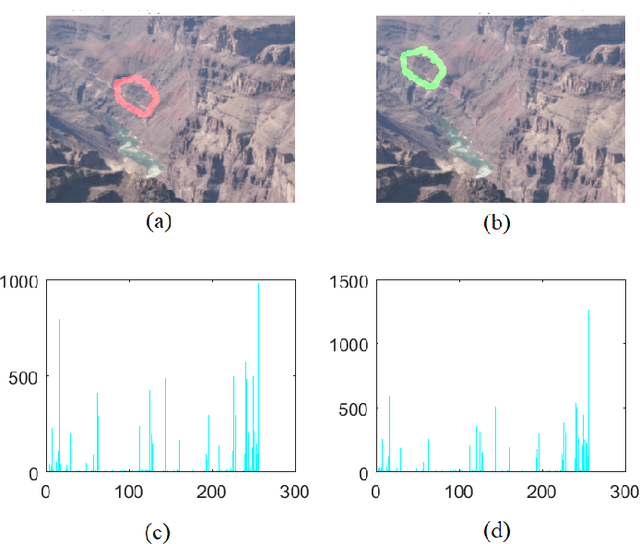
Since images are used as evidence in many cases, validation of digital images is essential. Copy-move forgery is a special kind of manipulation in which some parts of an image is copied and pasted into another part of the same image. Various methods have been proposed to detect copy-move forgery, which have achieved promising results. In previous methods, a binary mask determining the original and forged region is presented as the final result. However, it is not specified which part of the mask is the forged region. It should be noted that discriminating the original region from the duplicated one is not usually feasible by human visual system(HVS). On the other hand, exact localizing the forged region can be helpful for automatic forgery detection especially in combined forgeries. In real-world forgeries, some manipulations are performed in order to provide a visibly realistic scene. These modifications are usually applied on the boundary of the duplicated snippets. In this research, the texture information of the border regions of both the original and copied patches have been statistically investigated. Based on this analysis, we propose a method to discriminated copied snippets from original ones. In order to validate our method, GRIP dataset is utilized since it contains more realistic forged images which are not easily recognizable by HVS.
Artificial Skin Ridges Enhance Local Tactile Shape Discrimination
Sep 16, 2011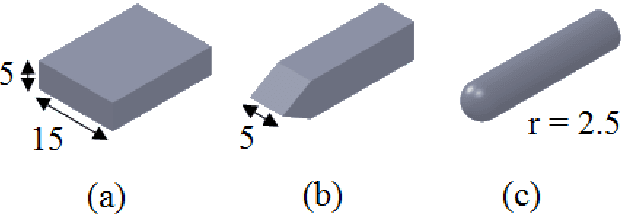
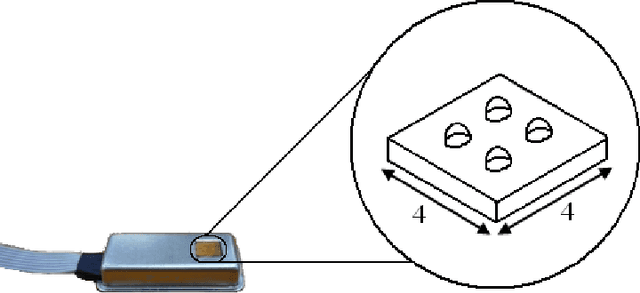
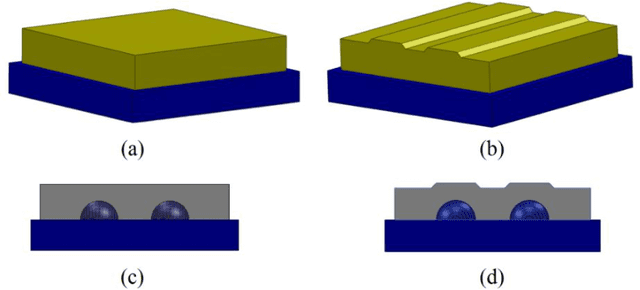
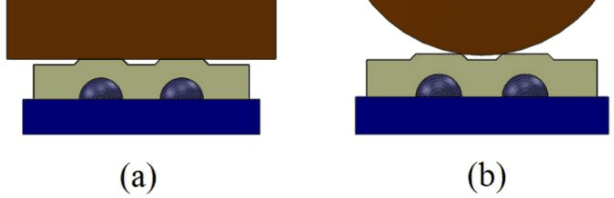
One of the fundamental requirements for an artificial hand to successfully grasp and manipulate an object is to be able to distinguish different objects' shapes and, more specifically, the objects' surface curvatures. In this study, we investigate the possibility of enhancing the curvature detection of embedded tactile sensors by proposing a ridged fingertip structure, simulating human fingerprints. In addition, a curvature detection approach based on machine learning methods is proposed to provide the embedded sensors with the ability to discriminate the surface curvature of different objects. For this purpose, a set of experiments were carried out to collect tactile signals from a 2 \times 2 tactile sensor array, then the signals were processed and used for learning algorithms. To achieve the best possible performance for our machine learning approach, three different learning algorithms of Na\"ive Bayes (NB), Artificial Neural Networks (ANN), and Support Vector Machines (SVM) were implemented and compared for various parameters. Finally, the most accurate method was selected to evaluate the proposed skin structure in recognition of three different curvatures. The results showed an accuracy rate of 97.5% in surface curvature discrimination.
* 10 figures