 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Distributed Fault-Tolerant Sensor Fusion: Fundamental Limits and Efficient Algorithms
Oct 09, 2022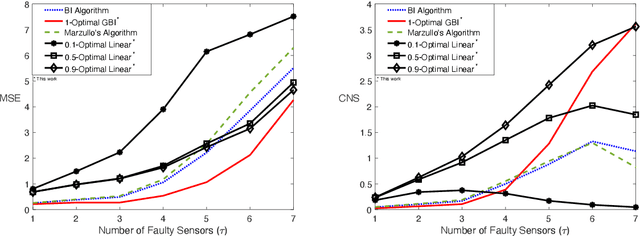
Distributed estimation is a fundamental problem in signal processing which finds applications in a variety of scenarios of interest including distributed sensor networks, robotics, group decision problems, and monitoring and surveillance applications. The problem considers a scenario where distributed agents are given a set of measurements, and are tasked with estimating a target variable. This work considers distributed estimation in the context of sensor networks, where a subset of sensor measurements are faulty and the distributed agents are agnostic to these faulty sensor measurements. The objective is to minimize i) the mean square error in estimating the target variable at each node (accuracy objective), and ii) the mean square distance between the estimates at each pair of nodes (consensus objective). It is shown that there is an inherent tradeoff between satisfying the former and latter objectives. The tradeoff is explicitly characterized and the fundamental performance limits are derived under specific statistical assumptions on the sensor output statistics. Assuming a general stochastic model, the sensor fusion algorithm optimizing this tradeoff is characterized through a computable optimization problem. Finding the optimal sensor fusion algorithm is computationally complex. To address this, a general class of low-complexity Brooks-Iyengar Algorithms are introduced, and their performance, in terms of accuracy and consensus objectives, is compared to that of optimal linear estimators through case study simulations of various scenarios.