 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign And Flight Testing Of LQRi Attitude Control For Quadcopter UAV
Apr 18, 2024



This paper presents the design, implementation, and flight test results of linear quadratic integral regulator (LQRi) based attitude control for a quadcopter UAV. We present the derivation of the mathematical model for the kinematics and dynamics of the UAV, along with the linearized state space representation of the system about hover conditions. LQR and LQRi controllers are then designed to stabilize the UAV in hover conditions and to track desired attitude commands. The controllers are then implemented onboard the Pixhawk flight controller and flight test results are discussed. Finally, the code related to this paper has been published open-source for replication and further research
Solar Potential Analysis of Rooftops Using Satellite Imagery
Dec 30, 2018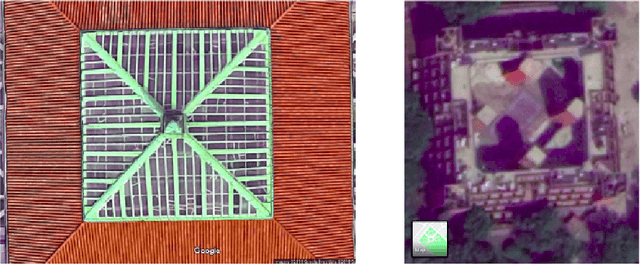

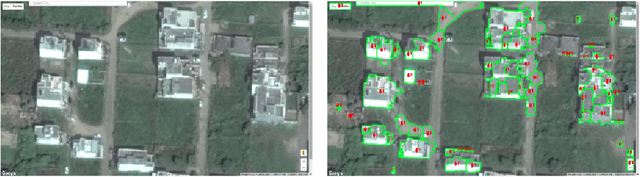
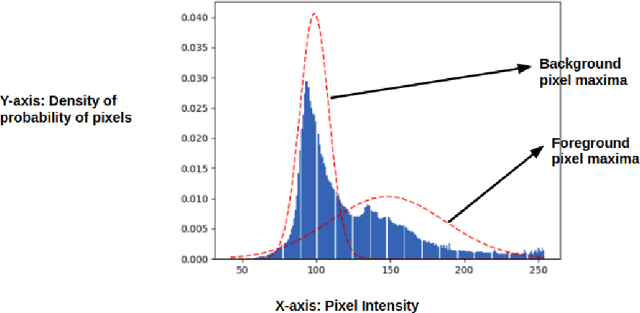
Solar energy is one of the most important sources of renewable energy and the cleanest form of energy. In India, where solar energy could produce power around trillion kilowatt hours in a year, we are producing only power of around 20 Gigawatts. Many people are not aware of the solar potential of their rooftop and hence they always think that installing solar panels is very much expensive. Therefore, we proposed an approach through which we can provide the amount of solar potential of a building using only its latitude and longitude. We evaluated various types of rooftops to make our solution more robust. We also provide an approximate area of rooftop that can be used for solar panels placement and a visual analysis of how solar panels can be placed to maximize the output of solar power at a location.
Improving Landmark Recognition using Saliency detection and Feature classification
Nov 30, 2018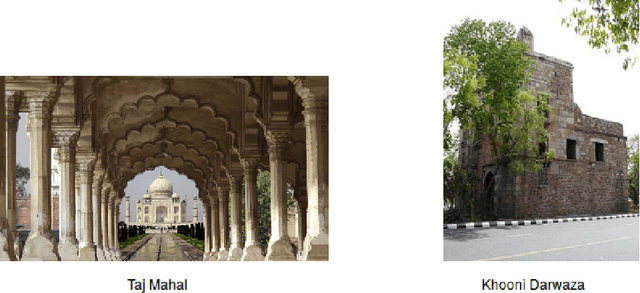

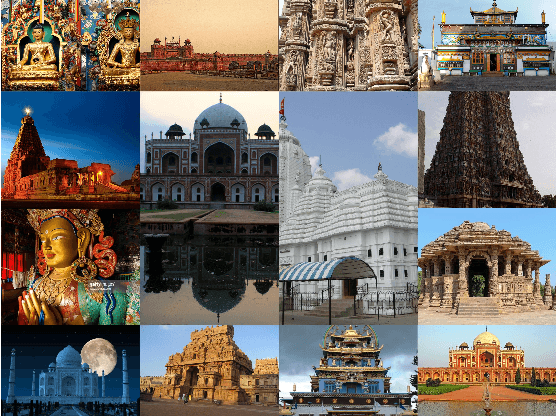
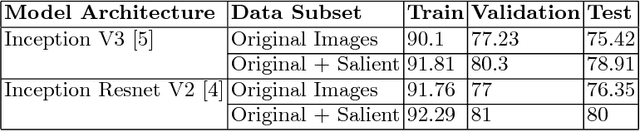
Image Landmark Recognition has been one of the most sought-after classification challenges in the field of vision and perception. After so many years of generic classification of buildings and monuments from images, people are now focussing upon fine-grained problems - recognizing the category of each building or monument. We proposed an ensemble network for the purpose of classification of Indian Landmark Images. To this end, our method gives robust classification by ensembling the predictions from Graph-Based Visual Saliency (GBVS) network alongwith supervised feature-based classification algorithms such as kNN and Random Forest. The final architecture is an adaptive learning of all the mentioned networks. The proposed network produces a reliable score to eliminate false category cases. Evaluation of our model was done on a new dataset, which involves challenges such as landmark clutter, variable scaling, partial occlusion, etc.