 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA hybrid quantum-classical fusion neural network to improve protein-ligand binding affinity predictions for drug discovery
Sep 06, 2023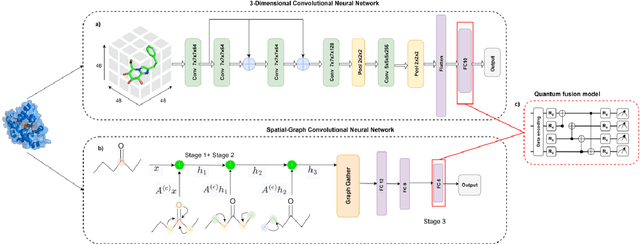
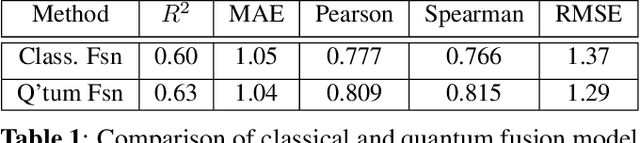
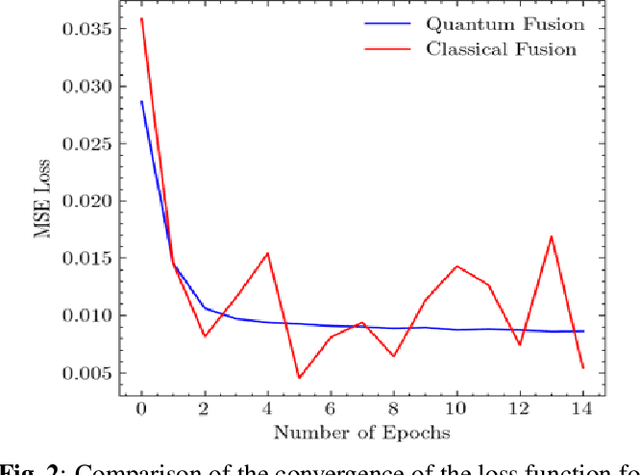
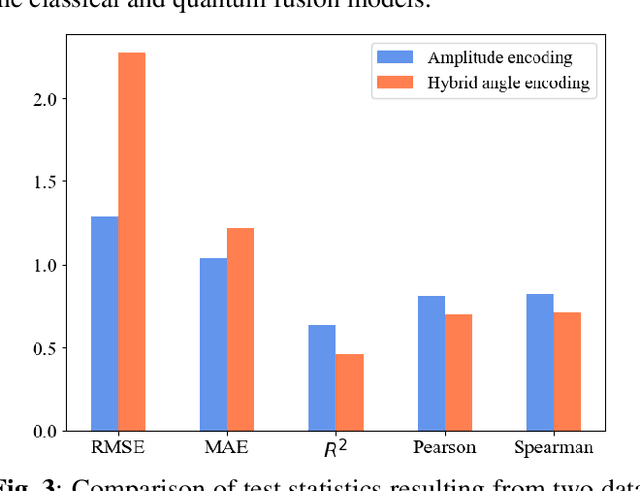
The field of drug discovery hinges on the accurate prediction of binding affinity between prospective drug molecules and target proteins, especially when such proteins directly influence disease progression. However, estimating binding affinity demands significant financial and computational resources. While state-of-the-art methodologies employ classical machine learning (ML) techniques, emerging hybrid quantum machine learning (QML) models have shown promise for enhanced performance, owing to their inherent parallelism and capacity to manage exponential increases in data dimensionality. Despite these advances, existing models encounter issues related to convergence stability and prediction accuracy. This paper introduces a novel hybrid quantum-classical deep learning model tailored for binding affinity prediction in drug discovery. Specifically, the proposed model synergistically integrates 3D and spatial graph convolutional neural networks within an optimized quantum architecture. Simulation results demonstrate a 6% improvement in prediction accuracy relative to existing classical models, as well as a significantly more stable convergence performance compared to previous classical approaches.
Adaptive Meta-Learning for Identification of Rover-Terrain Dynamics
Sep 21, 2020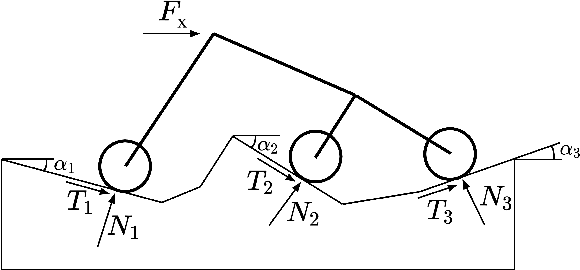
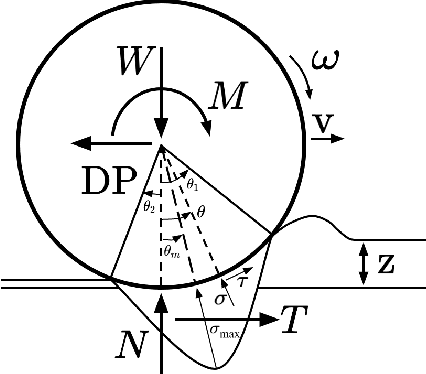
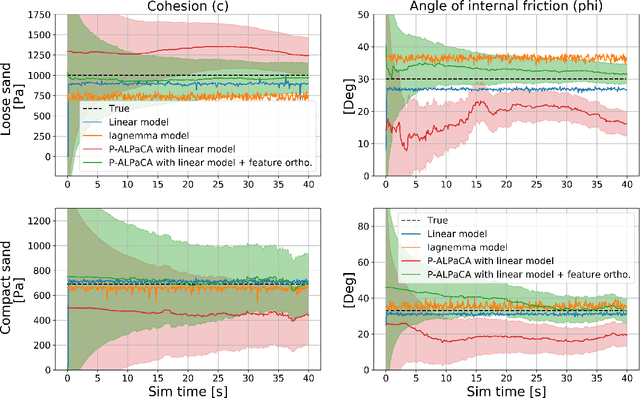
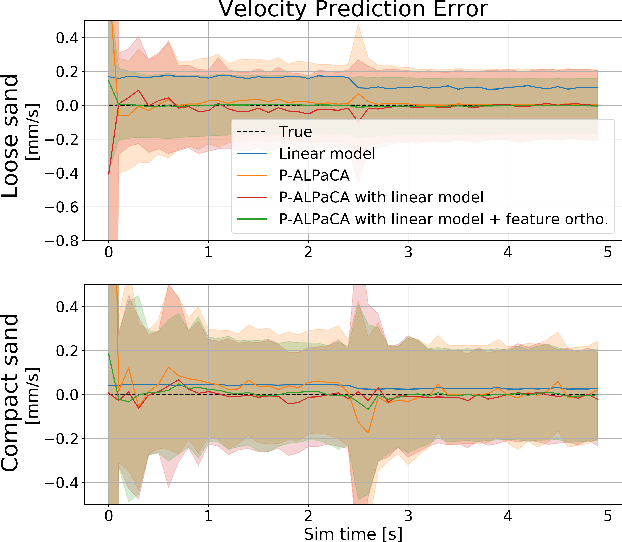
Rovers require knowledge of terrain to plan trajectories that maximize safety and efficiency. Terrain type classification relies on input from human operators or machine learning-based image classification algorithms. However, high level terrain classification is typically not sufficient to prevent incidents such as rovers becoming unexpectedly stuck in a sand trap; in these situations, online rover-terrain interaction data can be leveraged to accurately predict future dynamics and prevent further damage to the rover. This paper presents a meta-learning-based approach to adapt probabilistic predictions of rover dynamics by augmenting a nominal model affine in parameters with a Bayesian regression algorithm (P-ALPaCA). A regularization scheme is introduced to encourage orthogonality of nominal and learned features, leading to interpretable probabilistic estimates of terrain parameters in varying terrain conditions.