 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating System Identification Methods for Predicting Thermal Dissipation of Heterogeneous SoCs
Dec 19, 2021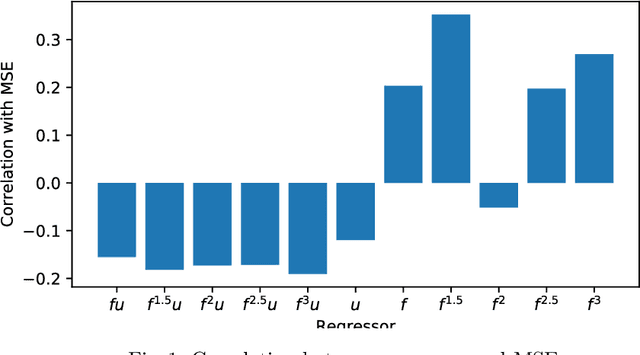

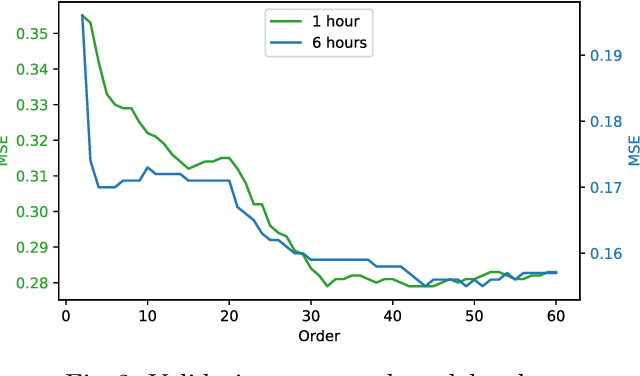
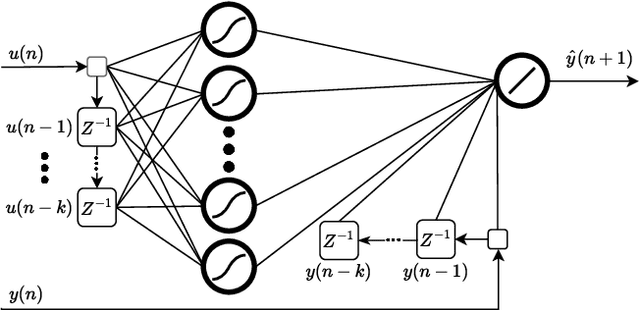
In this paper we evaluate the use of system identification methods to build a thermal prediction model of heterogeneous SoC platforms that can be used to quickly predict the temperature of different configurations without the need of hardware. Specifically, we focus on modeling approaches that can predict the temperature based on the clock frequency and the utilization percentage of each core. We investigate three methods with respect to their prediction accuracy: a linear state-space identification approach using polynomial regressors, a NARX neural network approach and a recurrent neural network approach configured in an FIR model structure. We evaluate the methods on an Odroid-XU4 board featuring an Exynos 5422 SoC. The results show that the model based on polynomial regressors significantly outperformed the other two models when trained with 1 hour and 6 hours of data.
Online GANs for Automatic Performance Testing
Apr 21, 2021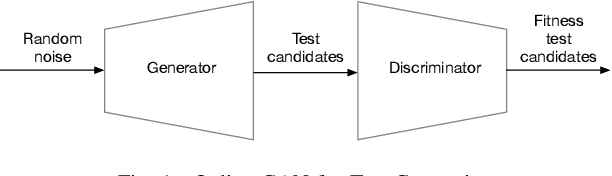
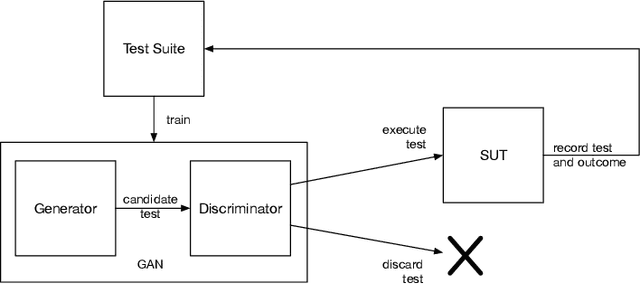
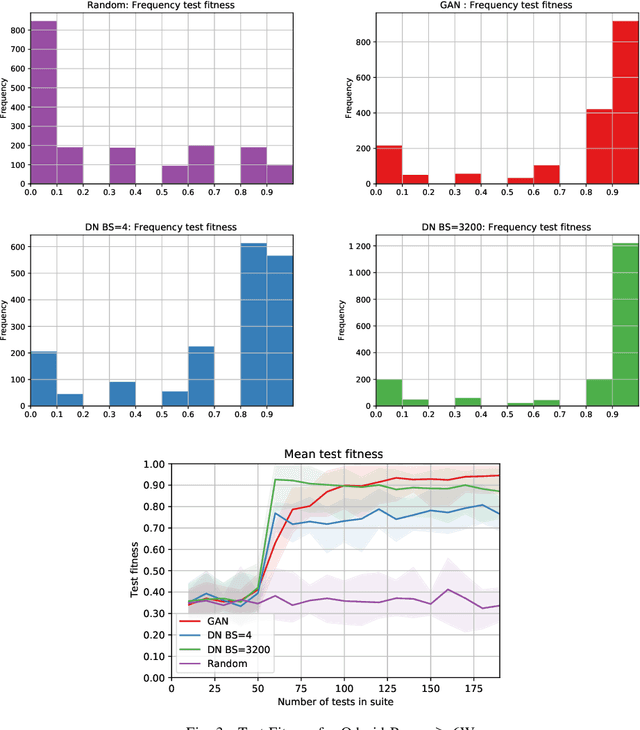
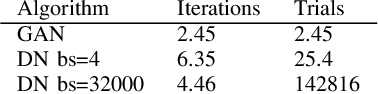
In this paper we present a novel algorithm for automatic performance testing that uses an online variant of the Generative Adversarial Network (GAN) to optimize the test generation process. The objective of the proposed approach is to generate, for a given test budget, a test suite containing a high number of tests revealing performance defects. This is achieved using a GAN to generate the tests and predict their outcome. This GAN is trained online while generating and executing the tests. The proposed approach does not require a prior training set or model of the system under test. We provide an initial evaluation the algorithm using an example test system, and compare the obtained results with other possible approaches. We consider that the presented algorithm serves as a proof of concept and we hope that it can spark a research discussion on the application of GANs to test generation.
On the Verification and Validation of AI Navigation Algorithms
Jan 15, 2021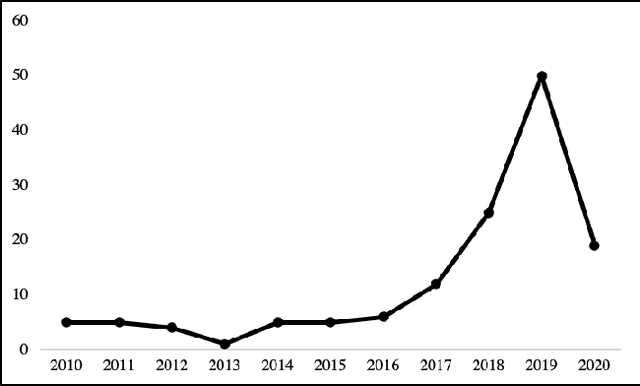
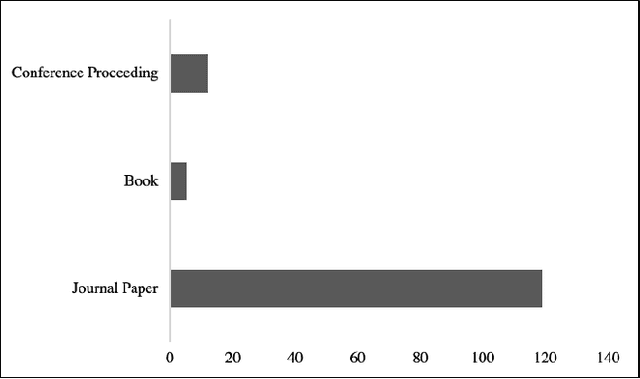
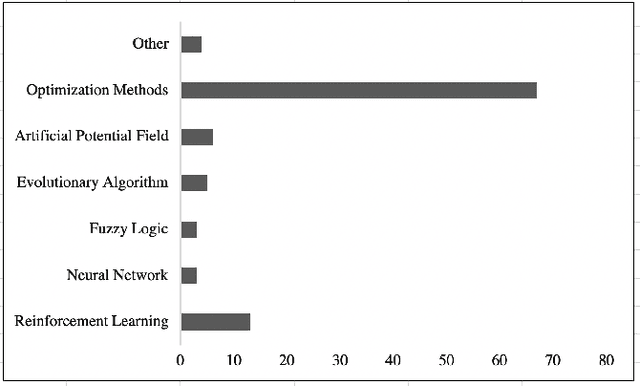
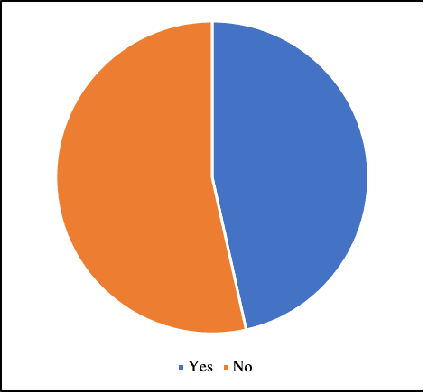
This paper explores the state of the art on to methods to verify and validate navigation algorithms for autonomous surface ships. We perform a systematic mapping study to find research works published in the last 10 years proposing new algorithms for autonomous navigation and collision avoidance and we have extracted what verification and validation approaches have been applied on these algorithms. We observe that most research works use simulations to validate their algorithms. However, these simulations often involve just a few scenarios designed manually. This raises the question if the algorithms have been validated properly. To remedy this, we propose the use of a systematic scenario-based testing approach to validate navigation algorithms extensively.