 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeABOShips -- An Inshore and Offshore Maritime Vessel Detection Dataset with Precise Annotations
Feb 11, 2021
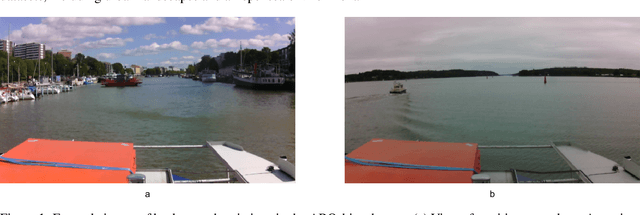
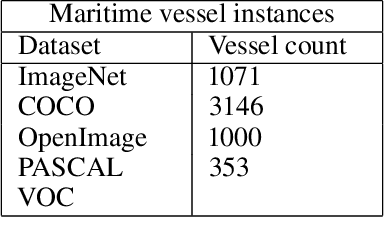
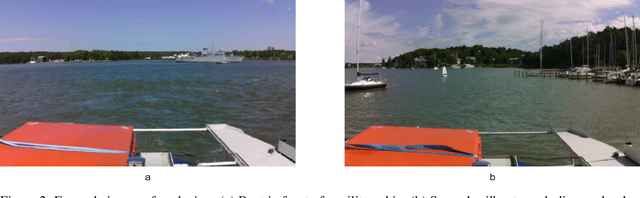
Availability of domain-specific datasets is an essential problem in object detection. Maritime vessel detection of inshore and offshore datasets is no exception, there is a limited number of studies addressing this need. For that reason, we collected a dataset of images of maritime vessels taking into account different factors: background variation, atmospheric conditions, illumination, visible proportion, occlusion and scale variation. Vessel instances (including 9 types of vessels), seamarks and miscellaneous floaters were precisely annotated: we employed a first round of labelling and subsequently, we used the CSRT [1] tracker to trace inconsistencies and relabel inadequate label instances. Moreover, we evaluated the the out-of-the-box performance of four prevalent object detection algorithms (Faster R-CNN [2], R-FCN [3], SSD [4] and EfficientDet [5]). The algorithms were previously trained on the Microsoft COCO dataset. We compare their accuracy based on feature extractor and object size. Our experiments show that Faster R-CNN with Inception-Resnet v2 outperforms the other algorithms, except in the large object category where EfficientDet surpasses the latter.
On the Verification and Validation of AI Navigation Algorithms
Jan 15, 2021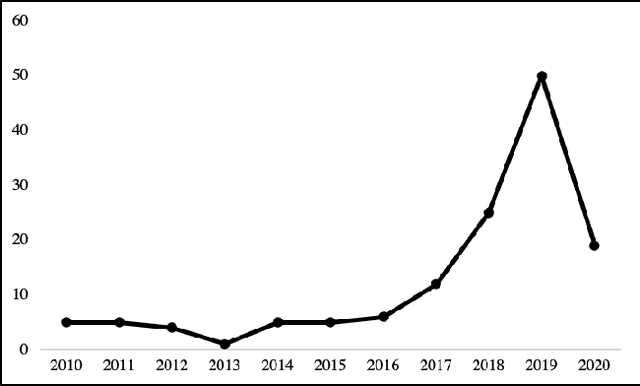
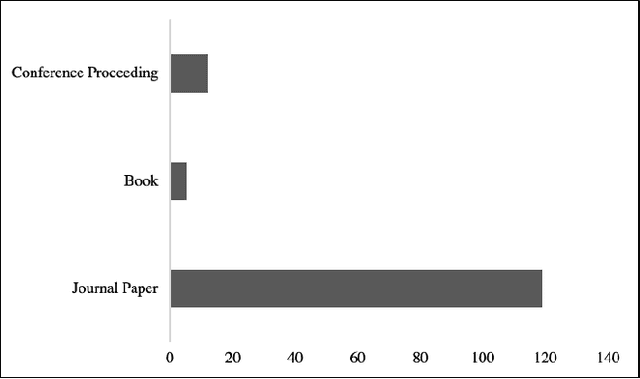
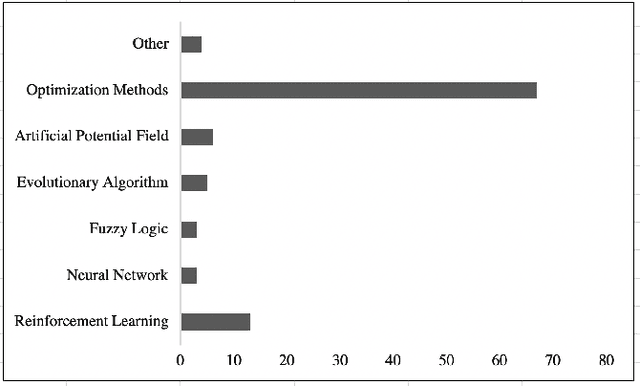
This paper explores the state of the art on to methods to verify and validate navigation algorithms for autonomous surface ships. We perform a systematic mapping study to find research works published in the last 10 years proposing new algorithms for autonomous navigation and collision avoidance and we have extracted what verification and validation approaches have been applied on these algorithms. We observe that most research works use simulations to validate their algorithms. However, these simulations often involve just a few scenarios designed manually. This raises the question if the algorithms have been validated properly. To remedy this, we propose the use of a systematic scenario-based testing approach to validate navigation algorithms extensively.