 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeV2X System Architecture Utilizing Hybrid Gaussian Process-based Model Structures
Mar 06, 2019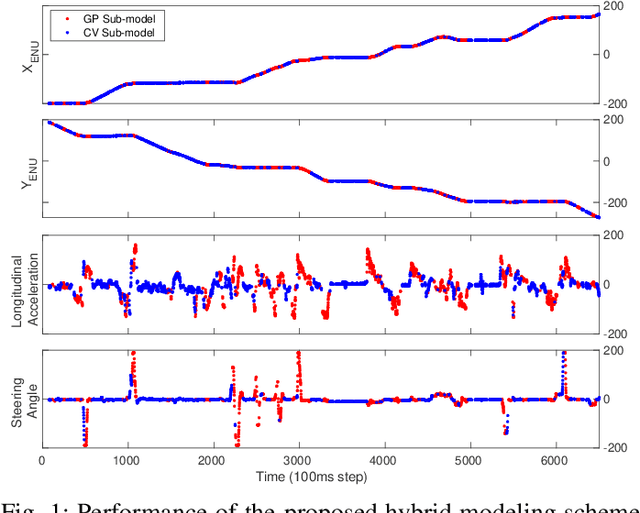
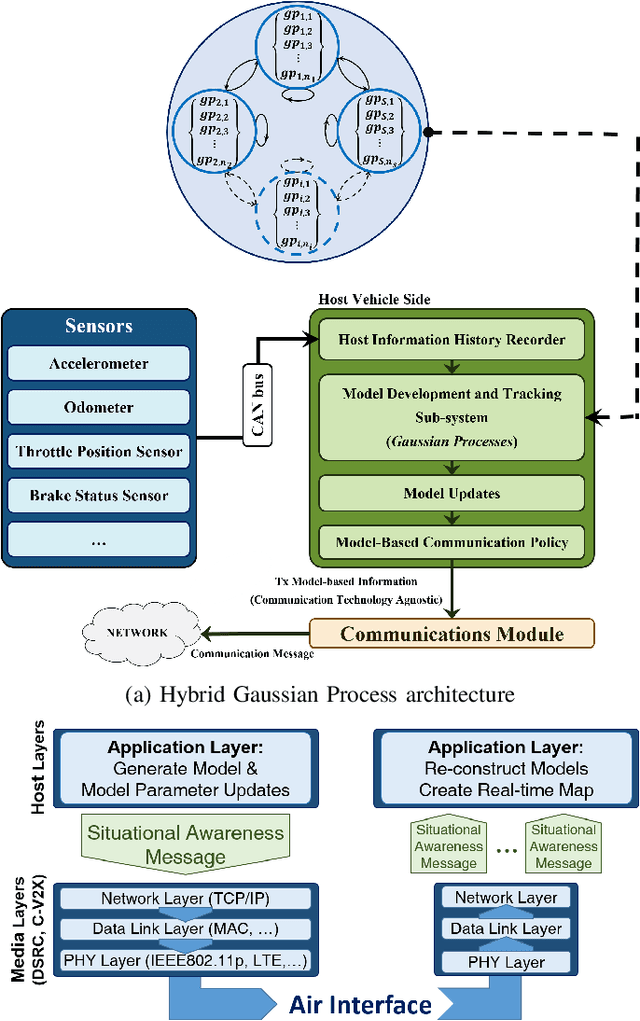
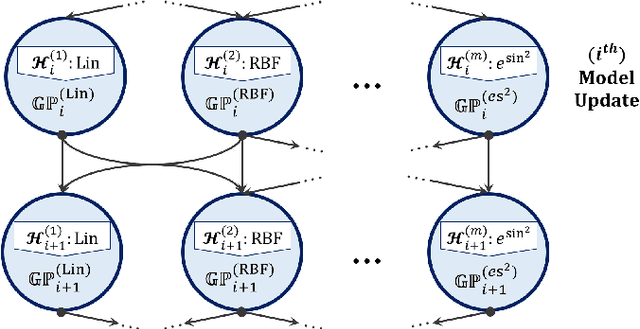
Scalable communication is of utmost importance for reliable dissemination of time-sensitive information in cooperative vehicular ad-hoc networks (VANETs), which is, in turn, an essential prerequisite for the proper operation of the critical cooperative safety applications. The model-based communication (MBC) is a recently-explored scalability solution proposed in the literature, which has shown a promising potential to reduce the channel congestion to a great extent. In this work, based on the MBC notion, a technology-agnostic hybrid model selection policy for Vehicle-to-Everything (V2X) communication is proposed which benefits from the characteristics of the non-parametric Bayesian inference techniques, specifically Gaussian Processes. The results show the effectiveness of the proposed communication architecture on both reducing the required message exchange rate and increasing the remote agent tracking precision.