 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSeMAIL: Eliminating Distractors in Visual Imitation via Separated Models
Jun 19, 2023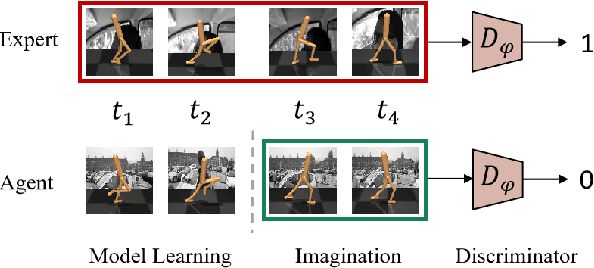



Model-based imitation learning (MBIL) is a popular reinforcement learning method that improves sample efficiency on high-dimension input sources, such as images and videos. Following the convention of MBIL research, existing algorithms are highly deceptive by task-irrelevant information, especially moving distractors in videos. To tackle this problem, we propose a new algorithm - named Separated Model-based Adversarial Imitation Learning (SeMAIL) - decoupling the environment dynamics into two parts by task-relevant dependency, which is determined by agent actions, and training separately. In this way, the agent can imagine its trajectories and imitate the expert behavior efficiently in task-relevant state space. Our method achieves near-expert performance on various visual control tasks with complex observations and the more challenging tasks with different backgrounds from expert observations.