 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisibility-Aware Keypoint Localization for 6DoF Object Pose Estimation
Mar 21, 2024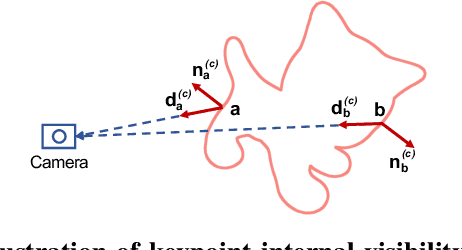



Localizing predefined 3D keypoints in a 2D image is an effective way to establish 3D-2D correspondences for 6DoF object pose estimation. However, unreliable localization results of invisible keypoints degrade the quality of correspondences. In this paper, we address this issue by localizing the important keypoints in terms of visibility. Since keypoint visibility information is currently missing in dataset collection process, we propose an efficient way to generate binary visibility labels from available object-level annotations, for keypoints of both asymmetric objects and symmetric objects. We further derive real-valued visibility-aware importance from binary labels based on PageRank algorithm. Taking advantage of the flexibility of our visibility-aware importance, we construct VAPO (Visibility-Aware POse estimator) by integrating the visibility-aware importance with a state-of-the-art pose estimation algorithm, along with additional positional encoding. Extensive experiments are conducted on popular pose estimation benchmarks including Linemod, Linemod-Occlusion, and YCB-V. The results show that, VAPO improves both the keypoint correspondences and final estimated poses, and clearly achieves state-of-the-art performances.
CheckerPose: Progressive Dense Keypoint Localization for Object Pose Estimation with Graph Neural Network
Mar 29, 2023Estimating the 6-DoF pose of a rigid object from a single RGB image is a crucial yet challenging task. Recent studies have shown the great potential of dense correspondence-based solutions, yet improvements are still needed to reach practical deployment. In this paper, we propose a novel pose estimation algorithm named CheckerPose, which improves on three main aspects. Firstly, CheckerPose densely samples 3D keypoints from the surface of the 3D object and finds their 2D correspondences progressively in the 2D image. Compared to previous solutions that conduct dense sampling in the image space, our strategy enables the correspondence searching in a 2D grid (i.e., pixel coordinate). Secondly, for our 3D-to-2D correspondence, we design a compact binary code representation for 2D image locations. This representation not only allows for progressive correspondence refinement but also converts the correspondence regression to a more efficient classification problem. Thirdly, we adopt a graph neural network to explicitly model the interactions among the sampled 3D keypoints, further boosting the reliability and accuracy of the correspondences. Together, these novel components make our CheckerPose a strong pose estimation algorithm. When evaluated on the popular Linemod, Linemod-O, and YCB-V object pose estimation benchmarks, CheckerPose clearly boosts the accuracy of correspondence-based methods and achieves state-of-the-art performances.
Modeling Deep Learning Based Privacy Attacks on Physical Mail
Dec 22, 2020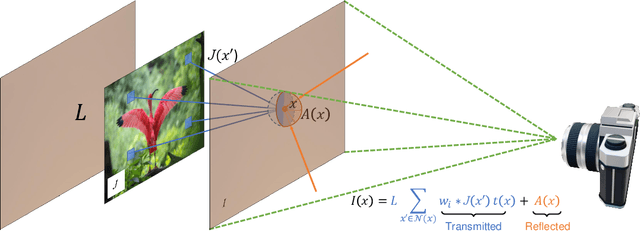

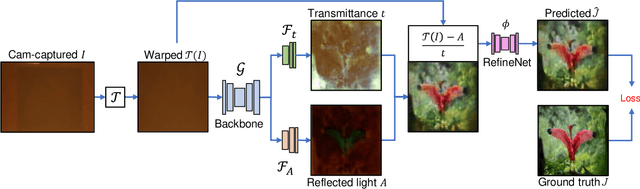
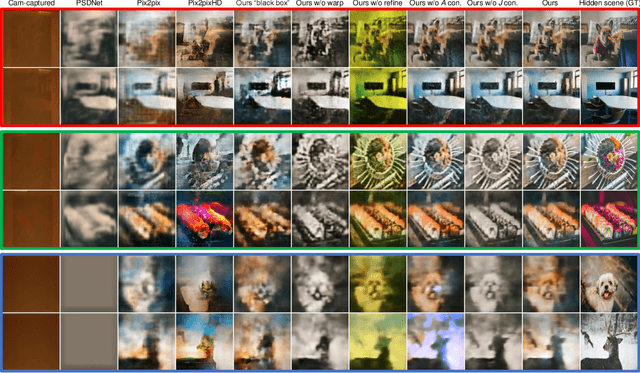
Mail privacy protection aims to prevent unauthorized access to hidden content within an envelope since normal paper envelopes are not as safe as we think. In this paper, for the first time, we show that with a well designed deep learning model, the hidden content may be largely recovered without opening the envelope. We start by modeling deep learning-based privacy attacks on physical mail content as learning the mapping from the camera-captured envelope front face image to the hidden content, then we explicitly model the mapping as a combination of perspective transformation, image dehazing and denoising using a deep convolutional neural network, named Neural-STE (See-Through-Envelope). We show experimentally that hidden content details, such as texture and image structure, can be clearly recovered. Finally, our formulation and model allow us to design envelopes that can counter deep learning-based privacy attacks on physical mail.