 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Positional and Relational Feature Learning for Rotation-Invariant Point Cloud Analysis
Nov 18, 2020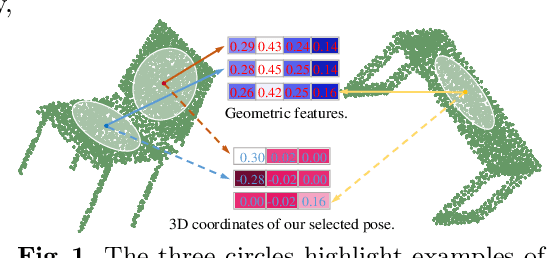
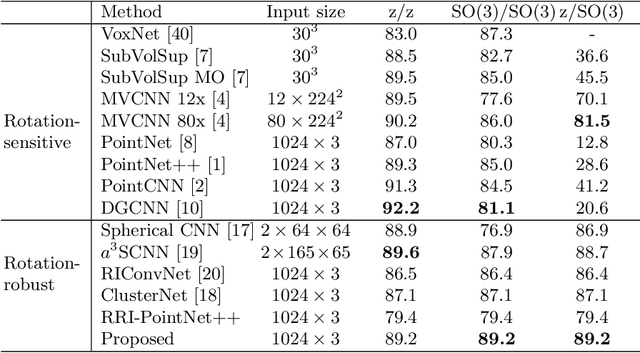
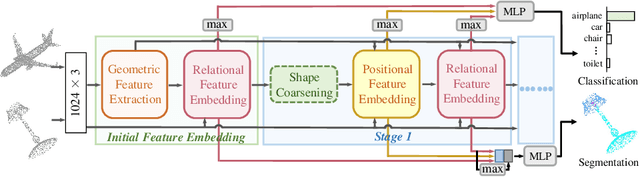

In this paper we propose a rotation-invariant deep network for point clouds analysis. Point-based deep networks are commonly designed to recognize roughly aligned 3D shapes based on point coordinates, but suffer from performance drops with shape rotations. Some geometric features, e.g., distances and angles of points as inputs of network, are rotation-invariant but lose positional information of points. In this work, we propose a novel deep network for point clouds by incorporating positional information of points as inputs while yielding rotation-invariance. The network is hierarchical and relies on two modules: a positional feature embedding block and a relational feature embedding block. Both modules and the whole network are proven to be rotation-invariant when processing point clouds as input. Experiments show state-of-the-art classification and segmentation performances on benchmark datasets, and ablation studies demonstrate effectiveness of the network design.
HRGE-Net: Hierarchical Relational Graph Embedding Network for Multi-view 3D Shape Recognition
Aug 27, 2019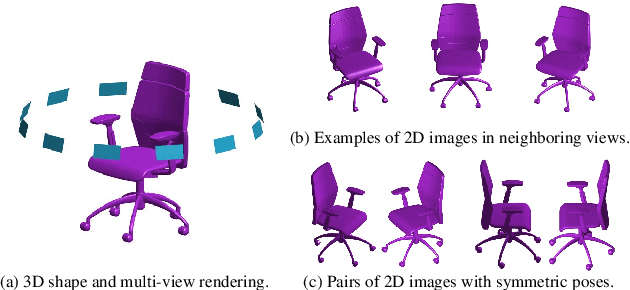
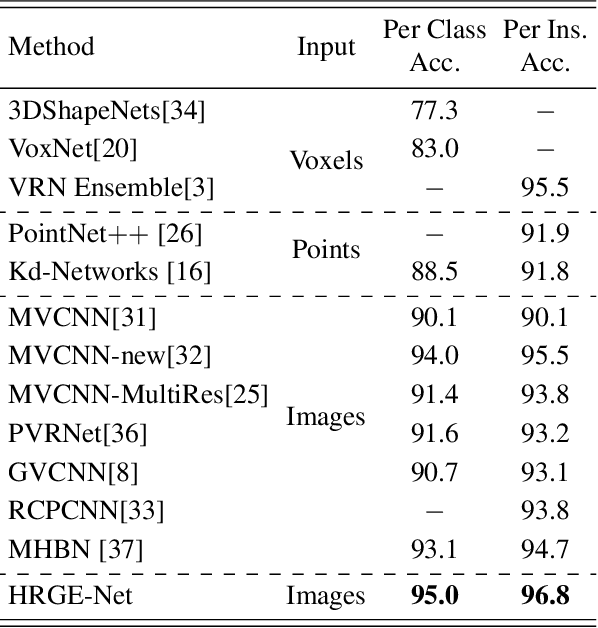
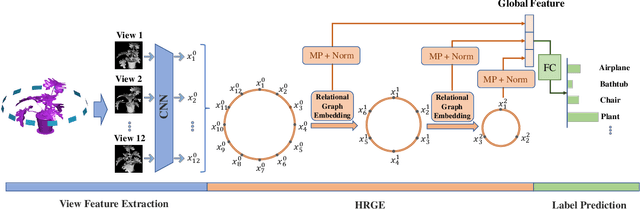
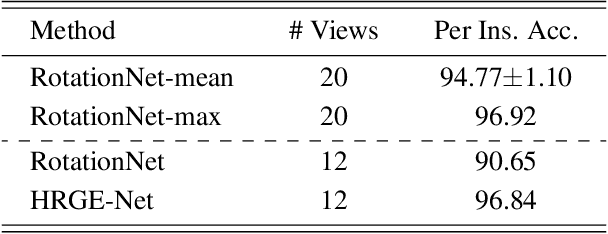
View-based approach that recognizes 3D shape through its projected 2D images achieved state-of-the-art performance for 3D shape recognition. One essential challenge for view-based approach is how to aggregate the multi-view features extracted from 2D images to be a global 3D shape descriptor. In this work, we propose a novel feature aggregation network by fully investigating the relations among views. We construct a relational graph with multi-view images as nodes, and design relational graph embedding by modeling pairwise and neighboring relations among views. By gradually coarsening the graph, we build a hierarchical relational graph embedding network (HRGE-Net) to aggregate the multi-view features to be a global shape descriptor. Extensive experiments show that HRGE-Net achieves stateof-the-art performance for 3D shape classification and retrieval on benchmark datasets.
Learning Spectral Transform Network on 3D Surface for Non-rigid Shape Analysis
Oct 21, 2018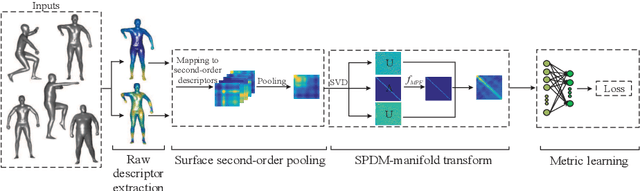
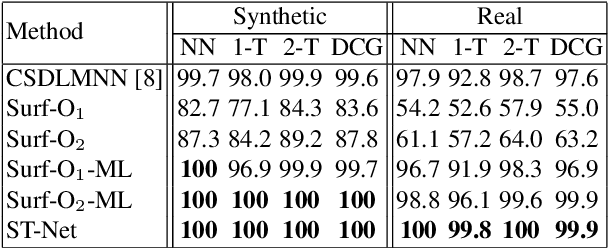

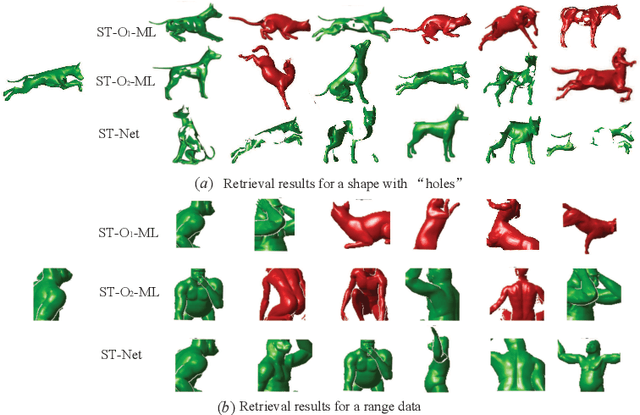
Designing a network on 3D surface for non-rigid shape analysis is a challenging task. In this work, we propose a novel spectral transform network on 3D surface to learn shape descriptors. The proposed network architecture consists of four stages: raw descriptor extraction, surface second-order pooling, mixture of power function-based spectral transform, and metric learning. The proposed network is simple and shallow. Quantitative experiments on challenging benchmarks show its effectiveness for non-rigid shape retrieval and classification, e.g., it achieved the highest accuracies on SHREC14, 15 datasets as well as the Range subset of SHREC17 dataset.