Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNoise-resistant Deep Learning for Object Classification in 3D Point Clouds Using a Point Pair Descriptor
Apr 05, 2018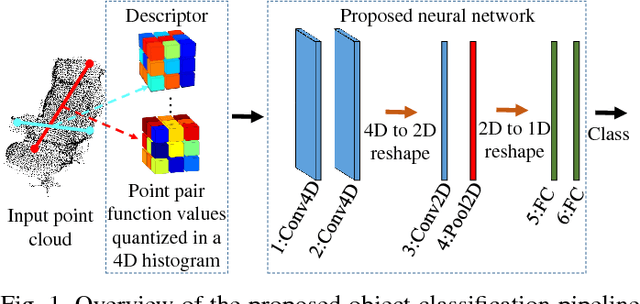
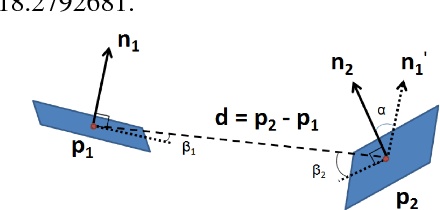
Object retrieval and classification in point cloud data is challenged by noise, irregular sampling density and occlusion. To address this issue, we propose a point pair descriptor that is robust to noise and occlusion and achieves high retrieval accuracy. We further show how the proposed descriptor can be used in a 4D convolutional neural network for the task of object classification. We propose a novel 4D convolutional layer that is able to learn class-specific clusters in the descriptor histograms. Finally, we provide experimental validation on 3 benchmark datasets, which confirms the superiority of the proposed approach.
* IEEE Robotics and Automation Letters 2018 Volume 3, Issue 2 IEEE
Robotics and Automation Letters IEEE Robotics and Automation Letters
* 8 pages
* 8 pages
Via