 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph Neural Networks at a Fraction
Feb 10, 2025



Graph Neural Networks (GNNs) have emerged as powerful tools for learning representations of graph-structured data. In addition to real-valued GNNs, quaternion GNNs also perform well on tasks on graph-structured data. With the aim of reducing the energy footprint, we reduce the model size while maintaining accuracy comparable to that of the original-sized GNNs. This paper introduces Quaternion Message Passing Neural Networks (QMPNNs), a framework that leverages quaternion space to compute node representations. Our approach offers a generalizable method for incorporating quaternion representations into GNN architectures at one-fourth of the original parameter count. Furthermore, we present a novel perspective on Graph Lottery Tickets, redefining their applicability within the context of GNNs and QMPNNs. We specifically aim to find the initialization lottery from the subnetwork of the GNNs that can achieve comparable performance to the original GNN upon training. Thereby reducing the trainable model parameters even further. To validate the effectiveness of our proposed QMPNN framework and LTH for both GNNs and QMPNNs, we evaluate their performance on real-world datasets across three fundamental graph-based tasks: node classification, link prediction, and graph classification.
IndoorGNN: A Graph Neural Network based approach for Indoor Localization using WiFi RSSI
Dec 11, 2023Indoor localization is the process of determining the location of a person or object inside a building. Potential usage of indoor localization includes navigation, personalization, safety and security, and asset tracking. Commonly used technologies for indoor localization include WiFi, Bluetooth, RFID, and Ultra-wideband. Among these, WiFi's Received Signal Strength Indicator (RSSI)-based localization is preferred because of widely available WiFi Access Points (APs). We have two main contributions. First, we develop our method, 'IndoorGNN' which involves using a Graph Neural Network (GNN) based algorithm in a supervised manner to classify a specific location into a particular region based on the RSSI values collected at that location. Most of the ML algorithms that perform this classification require a large number of labeled data points (RSSI vectors with location information). Collecting such data points is a labor-intensive and time-consuming task. To overcome this challenge, as our second contribution, we demonstrate the performance of IndoorGNN on the restricted dataset. It shows a comparable prediction accuracy to that of the complete dataset. We performed experiments on the UJIIndoorLoc and MNAV datasets, which are real-world standard indoor localization datasets. Our experiments show that IndoorGNN gives better location prediction accuracies when compared with state-of-the-art existing conventional as well as GNN-based methods for this same task. It continues to outperform these algorithms even with restricted datasets. It is noteworthy that its performance does not decrease a lot with a decrease in the number of available data points. Our method can be utilized for navigation and wayfinding in complex indoor environments, asset tracking and building management, enhancing mobile applications with location-based services, and improving safety and security during emergencies.
eBIM-GNN : Fast and Scalable energy analysis through BIMs and Graph Neural Networks
May 21, 2022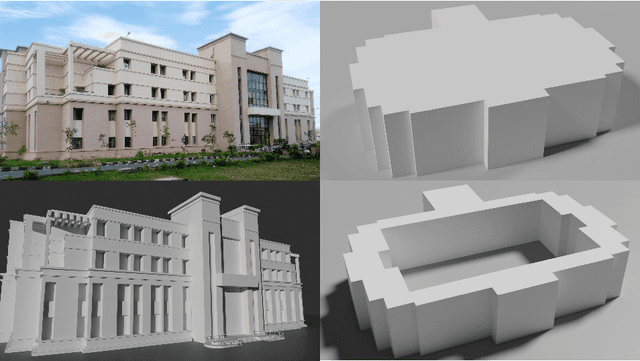
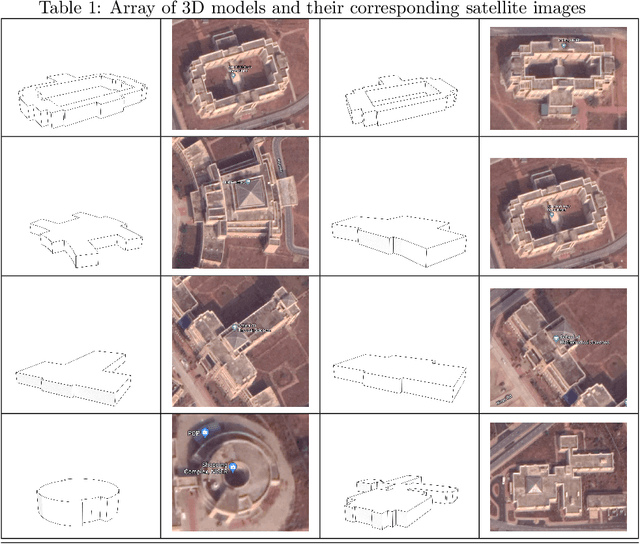
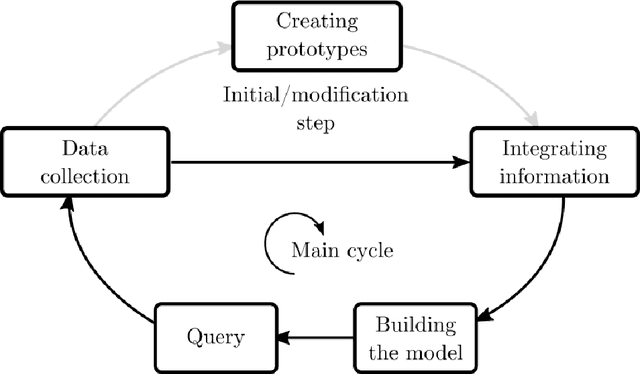
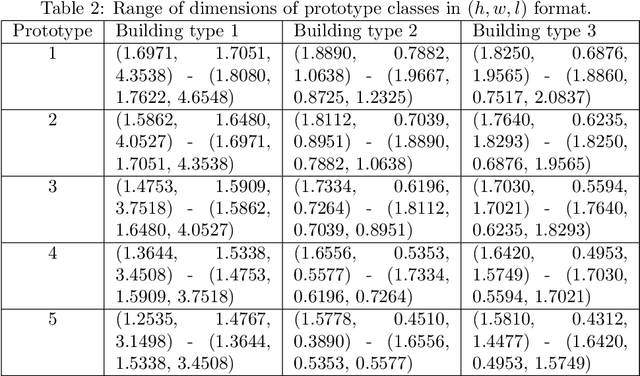
Building Information Modeling has been used to analyze as well as increase the energy efficiency of the buildings. It has shown significant promise in existing buildings by deconstruction and retrofitting. Current cities which were built without the knowledge of energy savings are now demanding better ways to become smart in energy utilization. However, the existing methods of generating BIMs work on building basis. Hence they are slow and expensive when we scale to a larger community or even entire towns or cities. In this paper, we propose a method to creation of prototype buildings that enable us to match and generate statistics very efficiently. Our method suggests better energy efficient prototypes for the existing buildings. The existing buildings are identified and located in the 3D point cloud. We perform experiments on synthetic dataset to demonstrate the working of our approach.
GAETS: A Graph Autoencoder Time Series Approach Towards Battery Parameter Estimation
Nov 17, 2021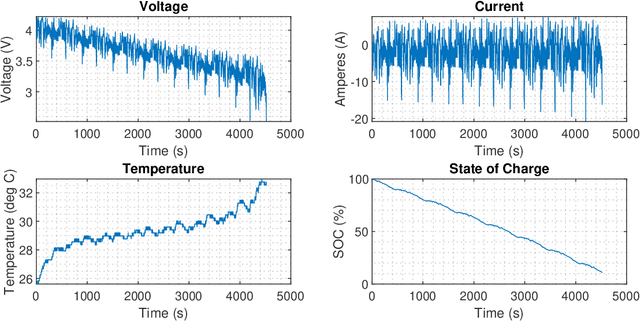
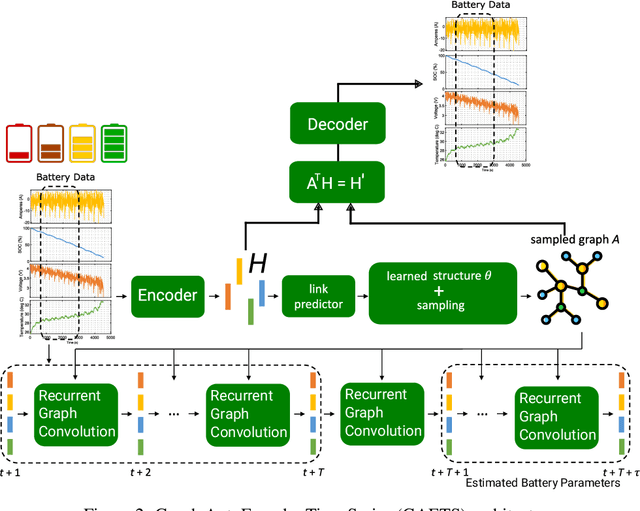
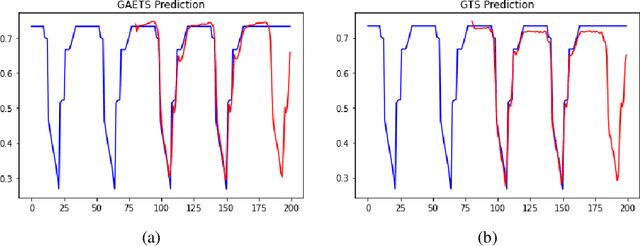
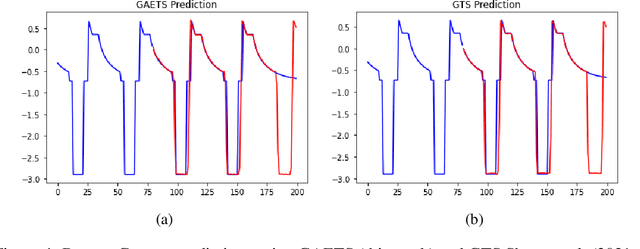
Lithium-ion batteries are powering the ongoing transportation electrification revolution. Lithium-ion batteries possess higher energy density and favourable electrochemical properties which make it a preferable energy source for electric vehicles. Precise estimation of battery parameters (Charge capacity, voltage etc) is vital to estimate the available range in an electric vehicle. Graph-based estimation techniques enable us to understand the variable dependencies underpinning them to improve estimates. In this paper we employ Graph Neural Networks for battery parameter estimation, we introduce a unique graph autoencoder time series estimation approach. Variables in battery measurements are known to have an underlying relationship with each other in a certain correlation within variables of interest. We use graph autoencoder based on a non-linear version of NOTEARS as this allowed us to perform gradient-descent in learning the structure (instead of treating it as a combinatorial optimisation problem). The proposed architecture outperforms the state-of-the-art Graph Time Series (GTS) architecture for battery parameter estimation. We call our method GAETS (Graph AutoEncoder Time Series).
Learning Graph Representations
Feb 03, 2021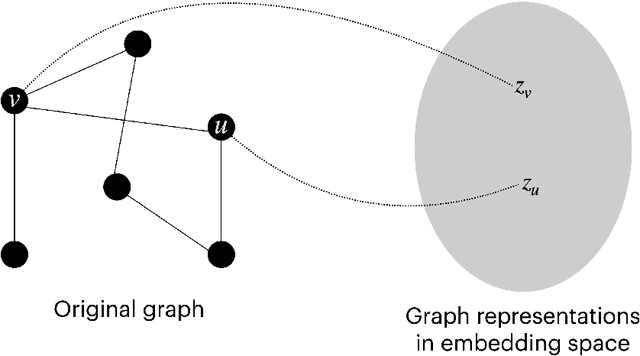
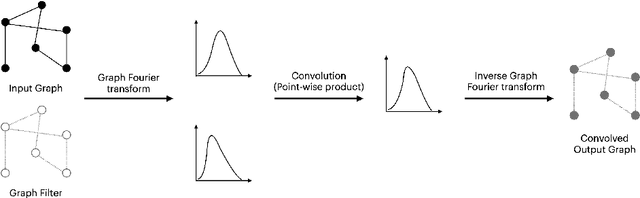
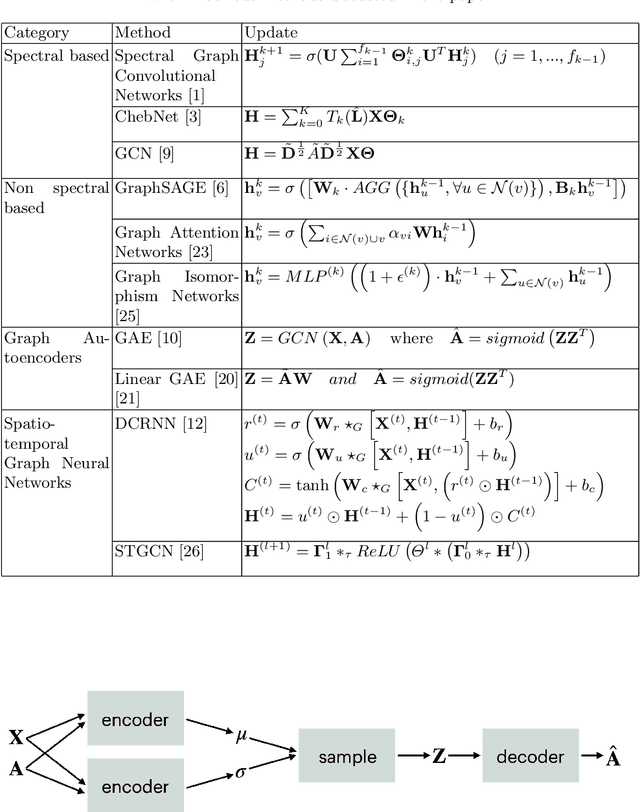
Social and information networks are gaining huge popularity recently due to their various applications. Knowledge representation through graphs in the form of nodes and edges should preserve as many characteristics of the original data as possible. Some of the interesting and useful applications on these graphs are graph classification, node classification, link prediction, etc. The Graph Neural Networks have evolved over the last few years. Graph Neural Networks (GNNs) are efficient ways to get insight into large and dynamic graph datasets capturing relationships among billions of entities also known as knowledge graphs. In this paper, we discuss the graph convolutional neural networks graph autoencoders and spatio-temporal graph neural networks. The representations of the graph in lower dimensions can be learned using these methods. The representations in lower dimensions can be used further for downstream machine learning tasks.