 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnomaly Detection in Unsupervised Surveillance Setting Using Ensemble of Multimodal Data with Adversarial Defense
Jul 17, 2020

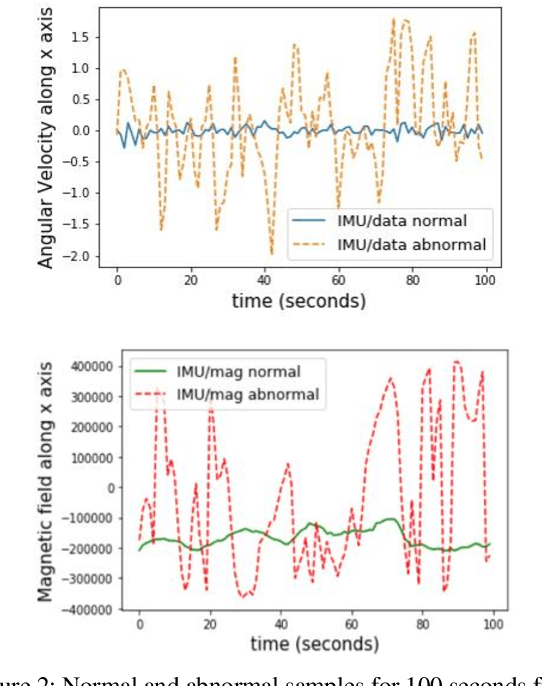

Autonomous aerial surveillance using drone feed is an interesting and challenging research domain. To ensure safety from intruders and potential objects posing threats to the zone being protected, it is crucial to be able to distinguish between normal and abnormal states in real-time. Additionally, we also need to consider any device malfunction. However, the inherent uncertainty embedded within the type and level of abnormality makes supervised techniques less suitable since the adversary may present a unique anomaly for intrusion. As a result, an unsupervised method for anomaly detection is preferable taking the unpredictable nature of attacks into account. Again in our case, the autonomous drone provides heterogeneous data streams consisting of images and other analog or digital sensor data, all of which can play a role in anomaly detection if they are ensembled synergistically. To that end, an ensemble detection mechanism is proposed here which estimates the degree of abnormality of analyzing the real-time image and IMU (Inertial Measurement Unit) sensor data in an unsupervised manner. First, we have implemented a Convolutional Neural Network (CNN) regression block, named AngleNet to estimate the angle between a reference image and current test image, which provides us with a measure of the anomaly of the device. Moreover, the IMU data are used in autoencoders to predict abnormality. Finally, the results from these two pipelines are ensembled to estimate the final degree of abnormality. Furthermore, we have applied adversarial attack to test the robustness and security of the proposed approach and integrated defense mechanism. The proposed method performs satisfactorily on the IEEE SP Cup-2020 dataset with an accuracy of 97.8%. Additionally, we have also tested this approach on an in-house dataset to validate its robustness.
Unsupervised Abnormality Detection Using Heterogeneous Autonomous Systems
Jun 05, 2020

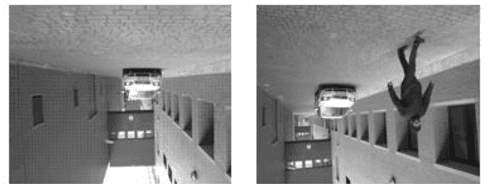
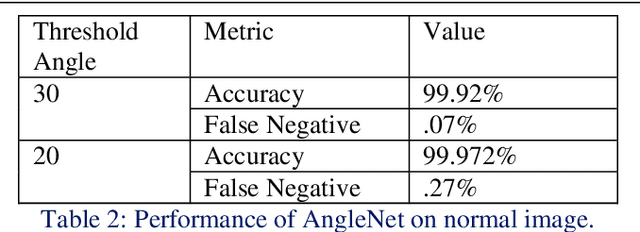
Anomaly detection in a surveillance scenario is an emerging and challenging field of research. For autonomous vehicles like drones or cars, it is immensely important to distinguish between normal and abnormal states in real-time to avoid/detect potential threats. But the nature and degree of abnormality may vary depending upon the actual environment and adversary. As a result, it is impractical to model all cases a priori and use supervised methods to classify. Also, an autonomous vehicle provides various data types like images and other analog or digital sensor data. In this paper, a heterogeneous system is proposed which estimates the degree of abnormality of an environment using drone-feed, analyzing real-time image and IMU sensor data in an unsupervised manner. Here, we have demonstrated AngleNet (a novel CNN architecture) to estimate the angle between a normal image and another image under consideration, which provides us with a measure of anomaly. Moreover, the IMU data are used in clustering models to predict abnormality. Finally, the results from these two algorithms are ensembled to estimate the final abnormality. The proposed method performs satisfactorily on the IEEE SP Cup-2020 dataset with an accuracy of 99.92%. Additionally, we have also tested this approach on an in-house dataset to validate its robustness.