 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised Abnormality Detection Using Heterogeneous Autonomous Systems
Jun 05, 2020

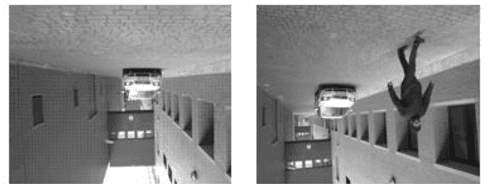
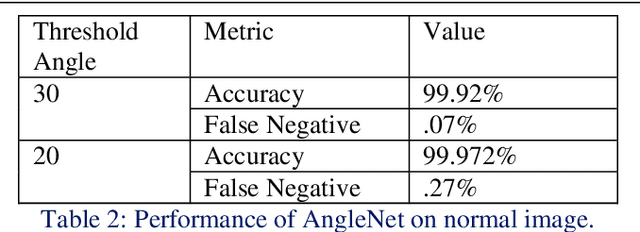
Anomaly detection in a surveillance scenario is an emerging and challenging field of research. For autonomous vehicles like drones or cars, it is immensely important to distinguish between normal and abnormal states in real-time to avoid/detect potential threats. But the nature and degree of abnormality may vary depending upon the actual environment and adversary. As a result, it is impractical to model all cases a priori and use supervised methods to classify. Also, an autonomous vehicle provides various data types like images and other analog or digital sensor data. In this paper, a heterogeneous system is proposed which estimates the degree of abnormality of an environment using drone-feed, analyzing real-time image and IMU sensor data in an unsupervised manner. Here, we have demonstrated AngleNet (a novel CNN architecture) to estimate the angle between a normal image and another image under consideration, which provides us with a measure of anomaly. Moreover, the IMU data are used in clustering models to predict abnormality. Finally, the results from these two algorithms are ensembled to estimate the final abnormality. The proposed method performs satisfactorily on the IEEE SP Cup-2020 dataset with an accuracy of 99.92%. Additionally, we have also tested this approach on an in-house dataset to validate its robustness.