 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAttending to Routers Aids Indoor Wireless Localization
Feb 18, 2026Modern machine learning-based wireless localization using Wi-Fi signals continues to face significant challenges in achieving groundbreaking performance across diverse environments. A major limitation is that most existing algorithms do not appropriately weight the information from different routers during aggregation, resulting in suboptimal convergence and reduced accuracy. Motivated by traditional weighted triangulation methods, this paper introduces the concept of attention to routers, ensuring that each router's contribution is weighted differently when aggregating information from multiple routers for triangulation. We demonstrate, by incorporating attention layers into a standard machine learning localization architecture, that emphasizing the relevance of each router can substantially improve overall performance. We have also shown through evaluation over the open-sourced datasets and demonstrate that Attention to Routers outperforms the benchmark architecture by over 30% in accuracy.
FedWiLoc: Federated Learning for Privacy-Preserving WiFi Indoor Localization
Dec 20, 2025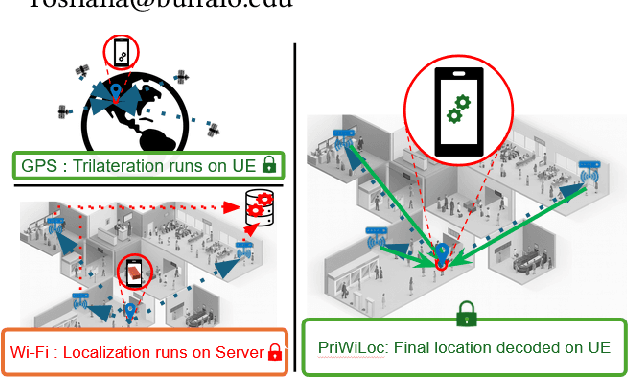
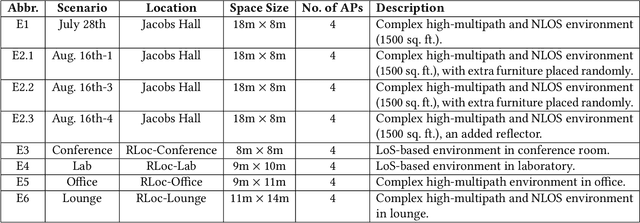

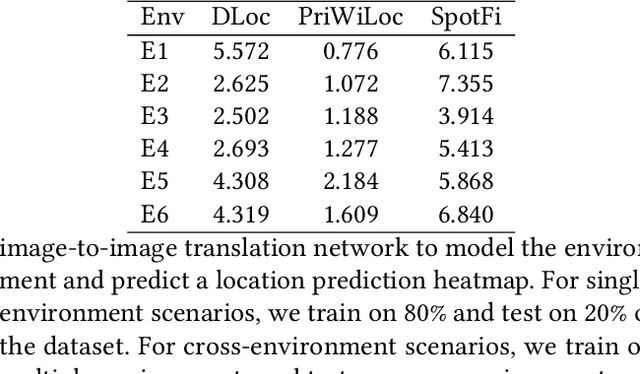
Current data-driven Wi-Fi-based indoor localization systems face three critical challenges: protecting user privacy, achieving accurate predictions in dynamic multipath environments, and generalizing across different deployments. Traditional Wi-Fi localization systems often compromise user privacy, particularly when facing compromised access points (APs) or man-in-the-middle attacks. As IoT devices proliferate in indoor environments, developing solutions that deliver accurate localization while robustly protecting privacy has become imperative. We introduce FedWiLoc, a privacy-preserving indoor localization system that addresses these challenges through three key innovations. First, FedWiLoc employs a split architecture where APs process Channel State Information (CSI) locally and transmit only privacy-preserving embedding vectors to user devices, preventing raw CSI exposure. Second, during training, FedWiLoc uses federated learning to collaboratively train the model across APs without centralizing sensitive user data. Third, we introduce a geometric loss function that jointly optimizes angle-of-arrival predictions and location estimates, enforcing geometric consistency to improve accuracy in challenging multipath conditions. Extensive evaluation across six diverse indoor environments spanning over 2,000 sq. ft. demonstrates that FedWiLoc outperforms state-of-the-art methods by up to 61.9% in median localization error while maintaining strong privacy guarantees throughout both training and inference.
DOLOS: Tricking the Wi-Fi APs with Incorrect User Locations
Jul 23, 2024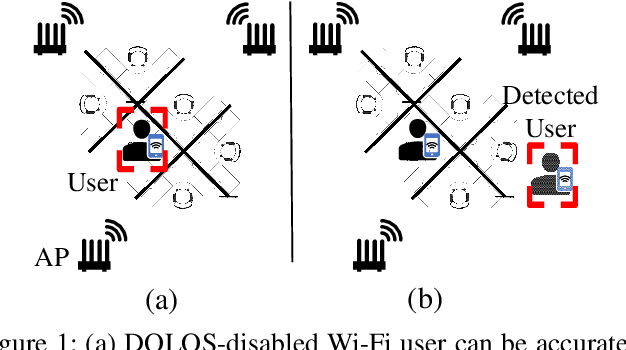
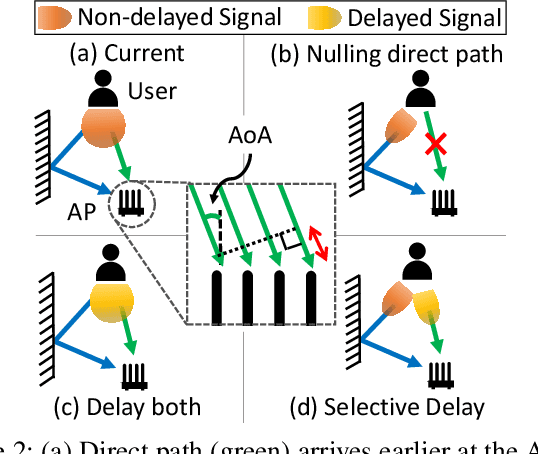
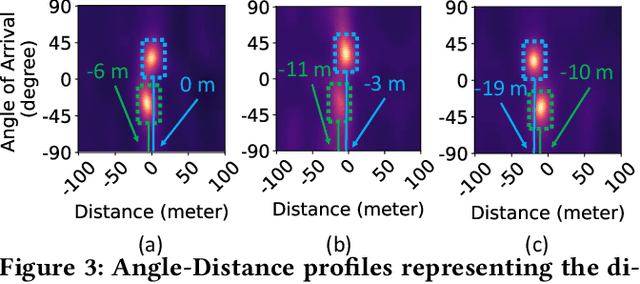
Wi-Fi-based indoor localization has been extensively studied for context-aware services. As a result, the accurate Wi-Fi-based indoor localization introduces a great location privacy threat. However, the existing solutions for location privacy protection are hard to implement on current devices. They require extra hardware deployment in the environment or hardware modifications at the transmitter or receiver side. To this end, we propose DOLOS, a system that can protect the location privacy of the Wi-Fi user with a novel signal obfuscation approach. DOLOSis a software-only solution that can be deployed on existing protocol-compliant Wi-Fi user devices. We provide this obfuscation by invalidating a simple assumption made by most localization systems -- "direct path signal arrives earlier than all the reflections to distinguish this direct path prior to estimating the location". However, DOLOS creates a novel software fix that allows the user to transmit the signal wherein this direct path arrives later, creating ambiguity in the location estimates. Our experimental results demonstrate DOLOS can degrade the localization accuracy of state-of-art systems by 6x for a single AP and 2.5x for multiple AP scenarios, thereby protecting the Wi-Fi user's location privacy without compromising the Wi-Fi communication performance.
Users are Closer than they Appear: Protecting User Location from WiFi APs
Nov 18, 2022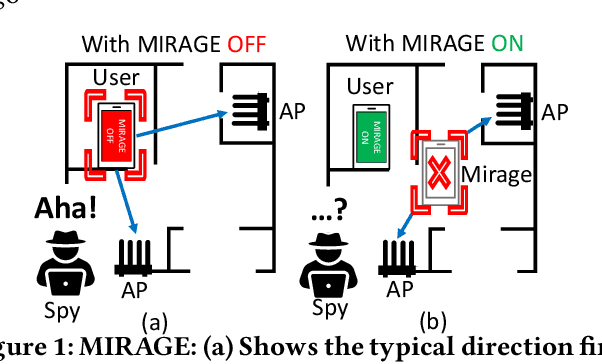
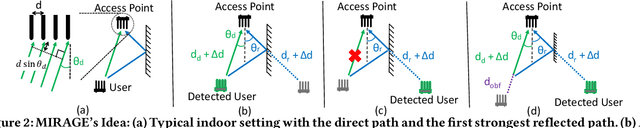

WiFi-based indoor localization has now matured for over a decade. Most of the current localization algorithms rely on the WiFi access points (APs) in the enterprise network to localize the WiFi user accurately. Thus, the WiFi user's location information could be easily snooped by an attacker listening through a compromised WiFi AP. With indoor localization and navigation being the next step towards automation, it is important to give users the capability to defend against such attacks. In this paper, we present MIRAGE, a system that can utilize the downlink physical layer information to create a defense against an attacker snooping on a WiFi user's location information. MIRAGE achieves this by utilizing the beamforming capability of the transmitter that is already part of the WiFi protocols. With this initial idea, we have demonstrated that the user can obfuscate his/her location from the WiFi AP always with no compromise to the throughput of the existing WiFi communication system and reduce the user location accuracy of the attacker from 2.3m to more than 10m.
ViWiD: Leveraging WiFi for Robust and Resource-Efficient SLAM
Sep 16, 2022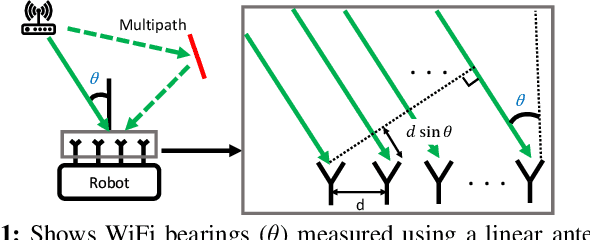
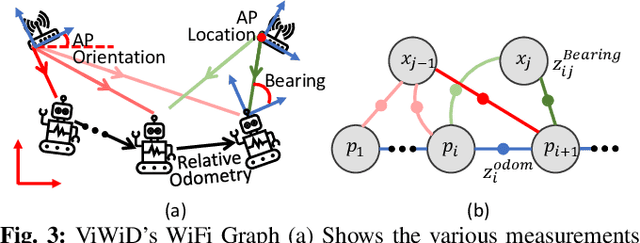

Recent interest towards autonomous navigation and exploration robots for indoor applications has spurred research into indoor Simultaneous Localization and Mapping (SLAM) robot systems. While most of these SLAM systems use Visual and LiDAR sensors in tandem with an odometry sensor, these odometry sensors drift over time. To combat this drift, Visual SLAM systems deploy compute and memory intensive search algorithms to detect `Loop Closures', which make the trajectory estimate globally consistent. To circumvent these resource (compute and memory) intensive algorithms, we present ViWiD, which integrates WiFi and Visual sensors in a dual-layered system. This dual-layered approach separates the tasks of local and global trajectory estimation making ViWiD resource efficient while achieving on-par or better performance to state-of-the-art Visual SLAM. We demonstrate ViWiD's performance on four datasets, covering over 1500 m of traversed path and show 4.3x and 4x reduction in compute and memory consumption respectively compared to state-of-the-art Visual and Lidar SLAM systems with on par SLAM performance.