 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Causal Models for Adversary Distractions
Apr 21, 2021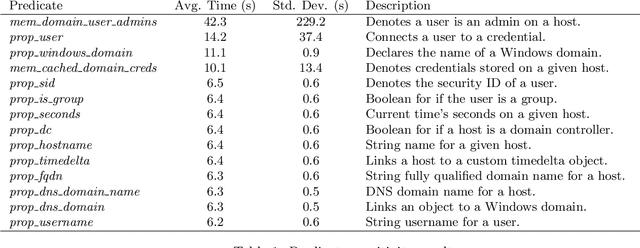
Automated adversary emulation is becoming an indispensable tool of network security operators in testing and evaluating their cyber defenses. At the same time, it has exposed how quickly adversaries can propagate through the network. While research has greatly progressed on quality decoy generation to fool human adversaries, we may need different strategies to slow computer agents. In this paper, we show that decoy generation can slow an automated agent's decision process, but that the degree to which it is inhibited is greatly dependent on the types of objects used. This points to the need to explicitly evaluate decoy generation and placement strategies against fast moving, automated adversaries.
Cost-Optimal Algorithms for Planning with Procedural Control Knowledge
Jul 07, 2016

There is an impressive body of work on developing heuristics and other reasoning algorithms to guide search in optimal and anytime planning algorithms for classical planning. However, very little effort has been directed towards developing analogous techniques to guide search towards high-quality solutions in hierarchical planning formalisms like HTN planning, which allows using additional domain-specific procedural control knowledge. In lieu of such techniques, this control knowledge often needs to provide the necessary search guidance to the planning algorithm, which imposes a substantial burden on the domain author and can yield brittle or error-prone domain models. We address this gap by extending recent work on a new hierarchical goal-based planning formalism called Hierarchical Goal Network (HGN) Planning to develop the Hierarchically-Optimal Goal Decomposition Planner (HOpGDP), an HGN planning algorithm that computes hierarchically-optimal plans. HOpGDP is guided by $h_{HL}$, a new HGN planning heuristic that extends existing admissible landmark-based heuristics from classical planning to compute admissible cost estimates for HGN planning problems. Our experimental evaluation across three benchmark planning domains shows that HOpGDP compares favorably to both optimal classical planners due to its ability to use domain-specific procedural knowledge, and a blind-search version of HOpGDP due to the search guidance provided by $h_{HL}$.