 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Dynamics from Infrequent Output Measurements for Uncertainty-Aware Optimal Control
Dec 08, 2025Reliable optimal control is challenging when the dynamics of a nonlinear system are unknown and only infrequent, noisy output measurements are available. This work addresses this setting of limited sensing by formulating a Bayesian prior over the continuous-time dynamics and latent state trajectory in state-space form and updating it through a targeted marginal Metropolis-Hastings sampler equipped with a numerical ODE integrator. The resulting posterior samples are used to formulate a scenario-based optimal control problem that accounts for both model and measurement uncertainty and is solved using standard nonlinear programming methods. The approach is validated in a numerical case study on glucose regulation using a Type 1 diabetes model.
Barrier Certificates for Unknown Systems with Latent States and Polynomial Dynamics using Bayesian Inference
Apr 02, 2025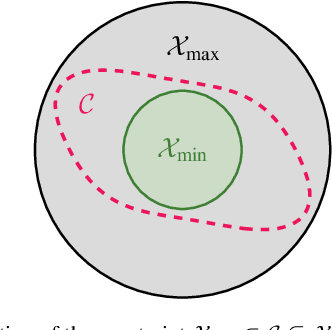



Certifying safety in dynamical systems is crucial, but barrier certificates - widely used to verify that system trajectories remain within a safe region - typically require explicit system models. When dynamics are unknown, data-driven methods can be used instead, yet obtaining a valid certificate requires rigorous uncertainty quantification. For this purpose, existing methods usually rely on full-state measurements, limiting their applicability. This paper proposes a novel approach for synthesizing barrier certificates for unknown systems with latent states and polynomial dynamics. A Bayesian framework is employed, where a prior in state-space representation is updated using input-output data via a targeted marginal Metropolis-Hastings sampler. The resulting samples are used to construct a candidate barrier certificate through a sum-of-squares program. It is shown that if the candidate satisfies the required conditions on a test set of additional samples, it is also valid for the true, unknown system with high probability. The approach and its probabilistic guarantees are illustrated through a numerical simulation.
Learning-Based Optimal Control with Performance Guarantees for Unknown Systems with Latent States
Mar 31, 2023

As control engineering methods are applied to increasingly complex systems, data-driven approaches for system identification appear as a promising alternative to physics-based modeling. While many of these approaches rely on the availability of state measurements, the states of a complex system are often not directly measurable. It may then be necessary to jointly estimate the dynamics and a latent state, making it considerably more challenging to design controllers with performance guarantees. This paper proposes a novel method for the computation of an optimal input trajectory for unknown nonlinear systems with latent states. Probabilistic performance guarantees are derived for the resulting input trajectory, and an approach to validate the performance of arbitrary control laws is presented. The effectiveness of the proposed method is demonstrated in a numerical simulation.