 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamical System Identification, Model Selection and Model Uncertainty Quantification by Bayesian Inference
Jan 30, 2024This study presents a Bayesian maximum \textit{a~posteriori} (MAP) framework for dynamical system identification from time-series data. This is shown to be equivalent to a generalized zeroth-order Tikhonov regularization, providing a rational justification for the choice of the residual and regularization terms, respectively, from the negative logarithms of the likelihood and prior distributions. In addition to the estimation of model coefficients, the Bayesian interpretation gives access to the full apparatus for Bayesian inference, including the ranking of models, the quantification of model uncertainties and the estimation of unknown (nuisance) hyperparameters. Two Bayesian algorithms, joint maximum \textit{a~posteriori} (JMAP) and variational Bayesian approximation (VBA), are compared to the popular SINDy algorithm for thresholded least-squares regression, by application to several dynamical systems with added noise. For multivariate Gaussian likelihood and prior distributions, the Bayesian formulation gives Gaussian posterior and evidence distributions, in which the numerator terms can be expressed in terms of the Mahalanobis distance or ``Gaussian norm'' $||\vy-\hat{\vy}||^2_{M^{-1}} = (\vy-\hat{\vy})^\top {M^{-1}} (\vy-\hat{\vy})$, where $\vy$ is a vector variable, $\hat{\vy}$ is its estimator and $M$ is the covariance matrix. The posterior Gaussian norm is shown to provide a robust metric for quantitative model selection.
Learning Optimal Control of Synchronization in Networks of Coupled Oscillators using Genetic Programming-based Symbolic Regression
Mar 20, 2018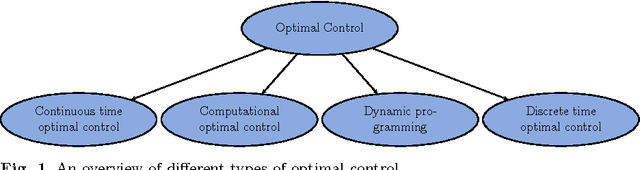
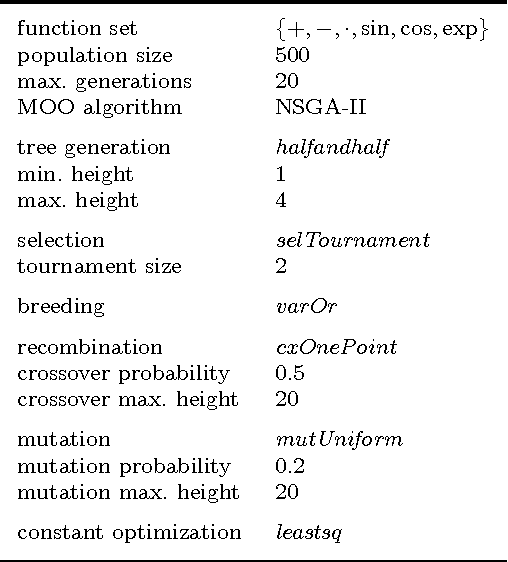
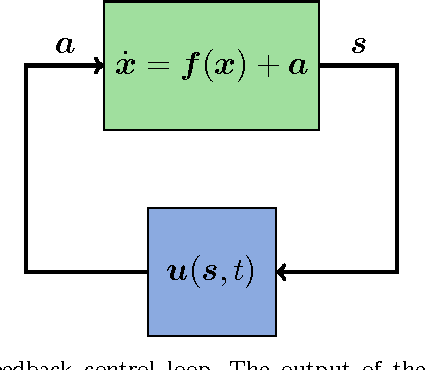
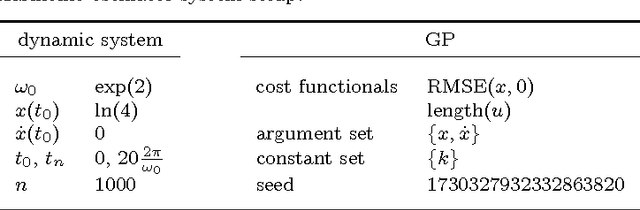
Networks of coupled dynamical systems provide a powerful way to model systems with enormously complex dynamics, such as the human brain. Control of synchronization in such networked systems has far reaching applications in many domains, including engineering and medicine. In this paper, we formulate the synchronization control in dynamical systems as an optimization problem and present a multi-objective genetic programming-based approach to infer optimal control functions that drive the system from a synchronized to a non-synchronized state and vice-versa. The genetic programming-based controller allows learning optimal control functions in an interpretable symbolic form. The effectiveness of the proposed approach is demonstrated in controlling synchronization in coupled oscillator systems linked in networks of increasing order complexity, ranging from a simple coupled oscillator system to a hierarchical network of coupled oscillators. The results show that the proposed method can learn highly-effective and interpretable control functions for such systems.
* Submitted to nonlinear dynamics