 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Inexact Weighted Proximal Trust-Region Method
Jan 13, 2026In [R. J. Baraldi and D. P. Kouri, Math. Program., 201:1 (2023), pp. 559-598], the authors introduced a trust-region method for minimizing the sum of a smooth nonconvex and a nonsmooth convex function, the latter of which has an analytical proximity operator. While many functions satisfy this criterion, e.g., the $\ell_1$-norm defined on $\ell_2$, many others are precluded by either the topology or the nature of the nonsmooth term. Using the $δ$-Fréchet subdifferential, we extend the definition of the inexact proximity operator and enable its use within the aforementioned trust-region algorithm. Moreover, we augment the analysis for the standard trust-region convergence theory to handle proximity operator inexactness with weighted inner products. We first introduce an algorithm to generate a point in the inexact proximity operator and then apply the algorithm within the trust-region method to solve an optimal control problem constrained by Burgers' equation.
Basis Pursuit Denoise with Nonsmooth Constraints
Nov 28, 2018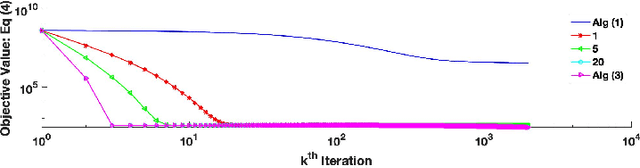
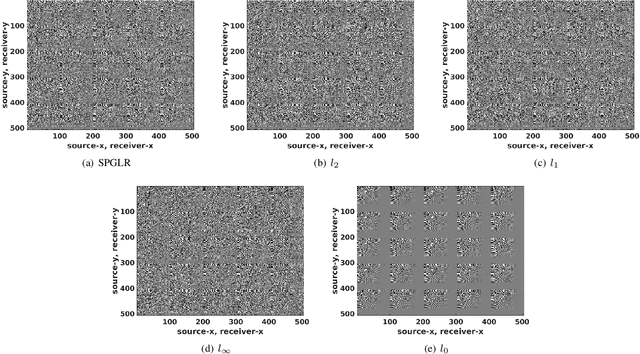
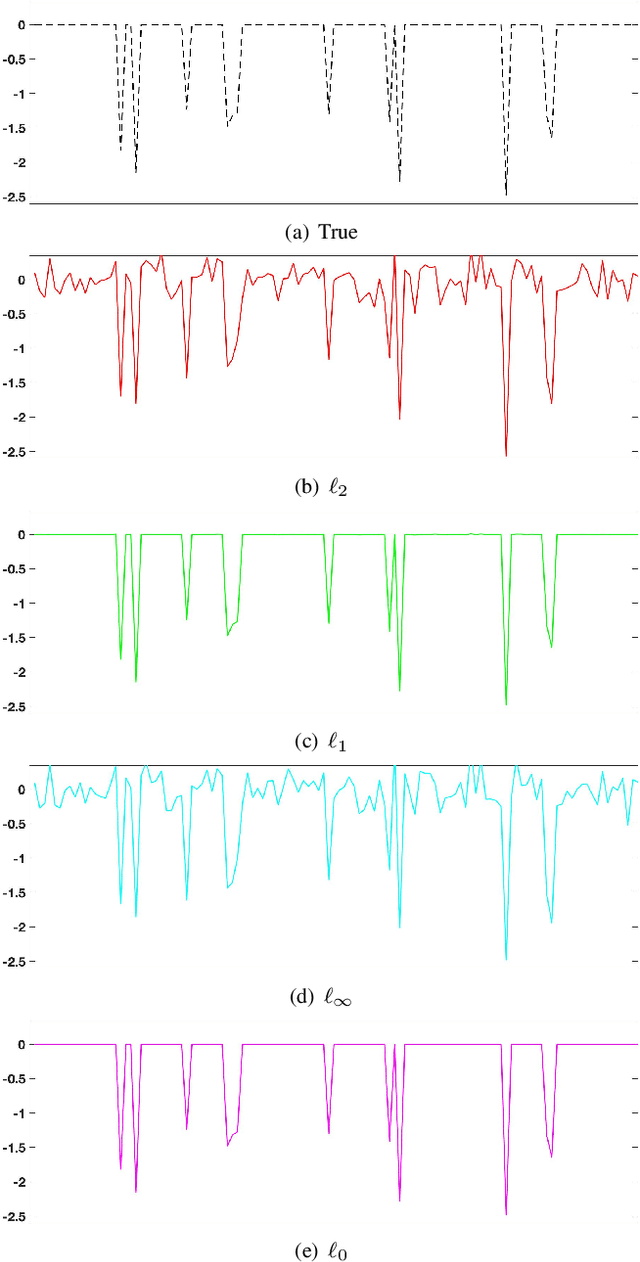
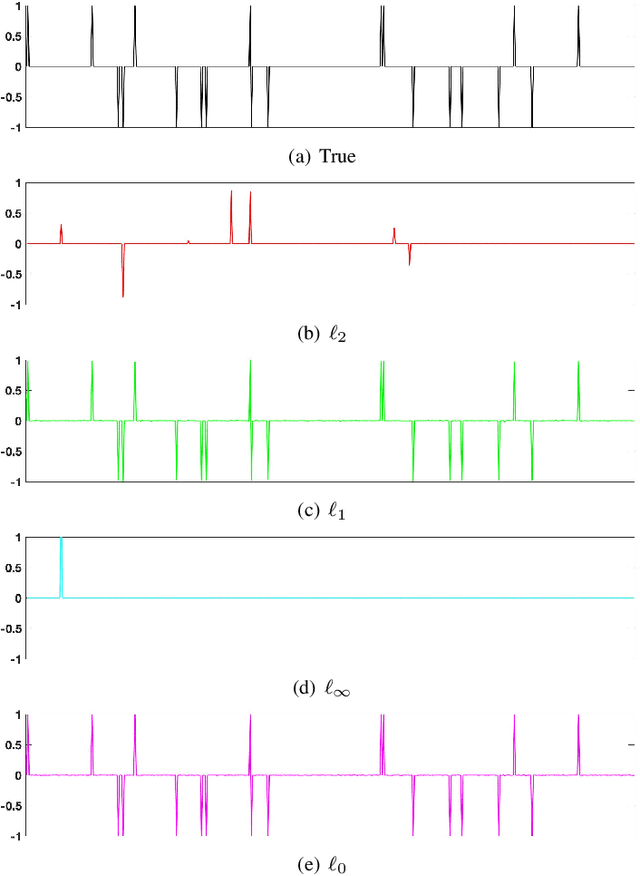
Level-set optimization formulations with data-driven constraints minimize a regularization functional subject to matching observations to a given error level. These formulations are widely used, particularly for matrix completion and sparsity promotion in data interpolation and denoising. The misfit level is typically measured in the l2 norm, or other smooth metrics. In this paper, we present a new flexible algorithmic framework that targets nonsmooth level-set constraints, including L1, Linf, and even L0 norms. These constraints give greater flexibility for modeling deviations in observation and denoising, and have significant impact on the solution. Measuring error in the L1 and L0 norms makes the result more robust to large outliers, while matching many observations exactly. We demonstrate the approach for basis pursuit denoise (BPDN) problems as well as for extensions of BPDN to matrix factorization, with applications to interpolation and denoising of 5D seismic data. The new methods are particularly promising for seismic applications, where the amplitude in the data varies significantly, and measurement noise in low-amplitude regions can wreak havoc for standard Gaussian error models.