 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeepLiDARFlow: A Deep Learning Architecture For Scene Flow Estimation Using Monocular Camera and Sparse LiDAR
Aug 18, 2020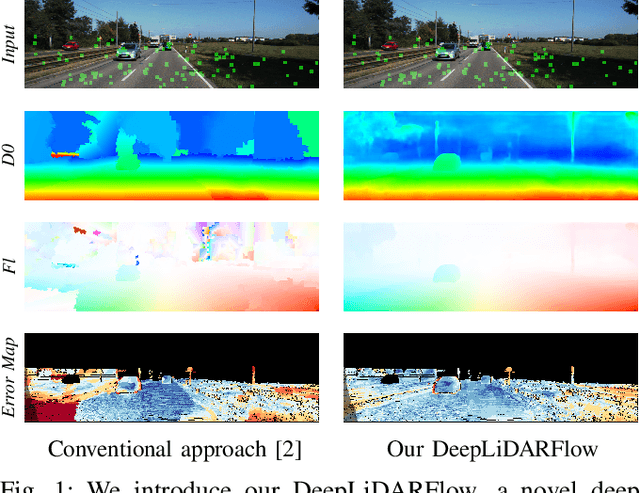
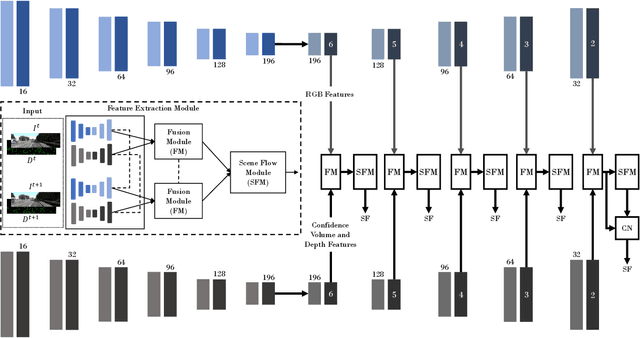
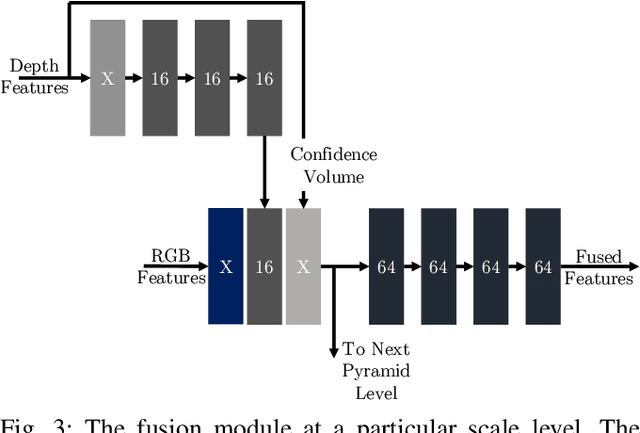
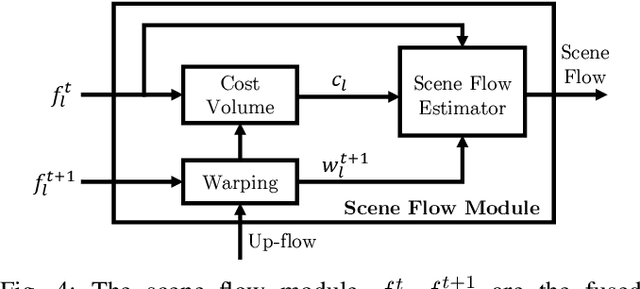
Scene flow is the dense 3D reconstruction of motion and geometry of a scene. Most state-of-the-art methods use a pair of stereo images as input for full scene reconstruction. These methods depend a lot on the quality of the RGB images and perform poorly in regions with reflective objects, shadows, ill-conditioned light environment and so on. LiDAR measurements are much less sensitive to the aforementioned conditions but LiDAR features are in general unsuitable for matching tasks due to their sparse nature. Hence, using both LiDAR and RGB can potentially overcome the individual disadvantages of each sensor by mutual improvement and yield robust features which can improve the matching process. In this paper, we present DeepLiDARFlow, a novel deep learning architecture which fuses high level RGB and LiDAR features at multiple scales in a monocular setup to predict dense scene flow. Its performance is much better in the critical regions where image-only and LiDAR-only methods are inaccurate. We verify our DeepLiDARFlow using the established data sets KITTI and FlyingThings3D and we show strong robustness compared to several state-of-the-art methods which used other input modalities. The code of our paper is available at https://github.com/dfki-av/DeepLiDARFlow.
ResFPN: Residual Skip Connections in Multi-Resolution Feature Pyramid Networks for Accurate Dense Pixel Matching
Jun 22, 2020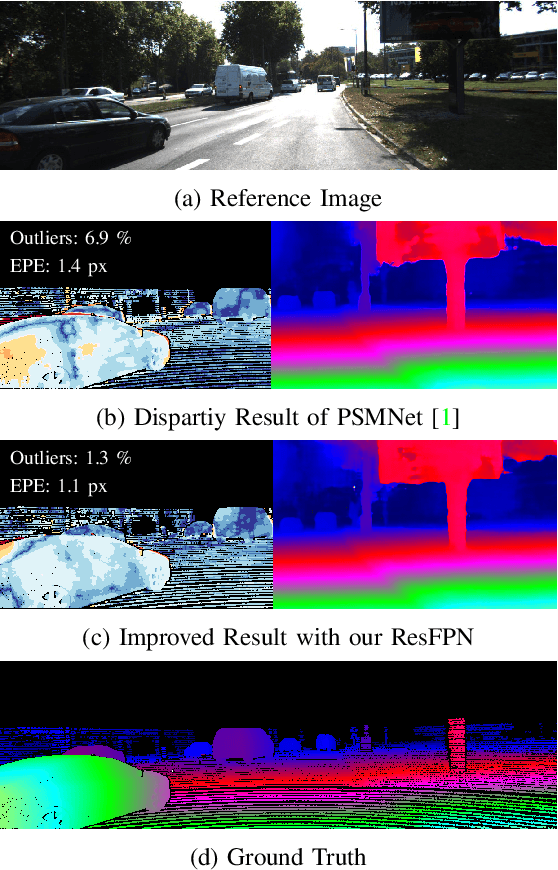
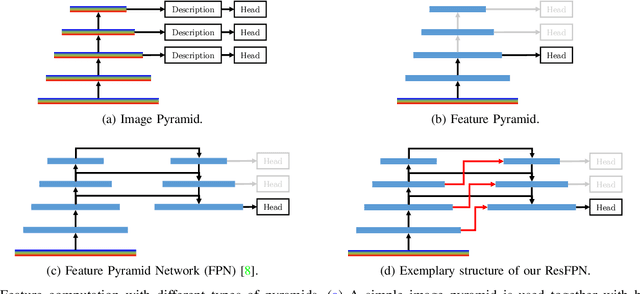
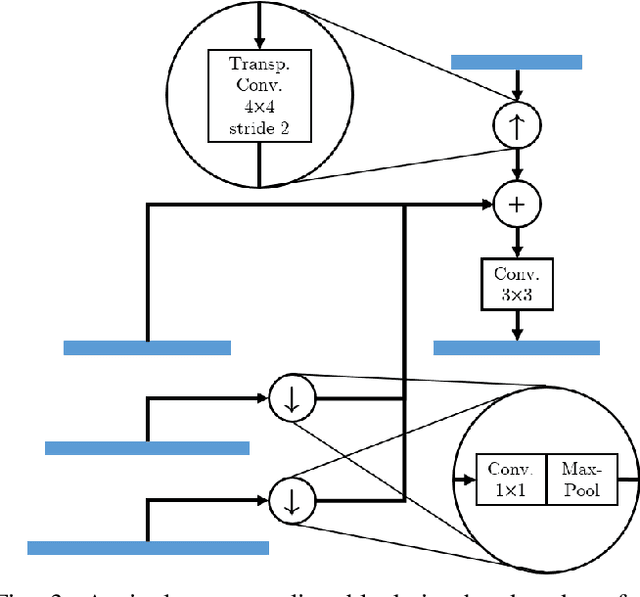
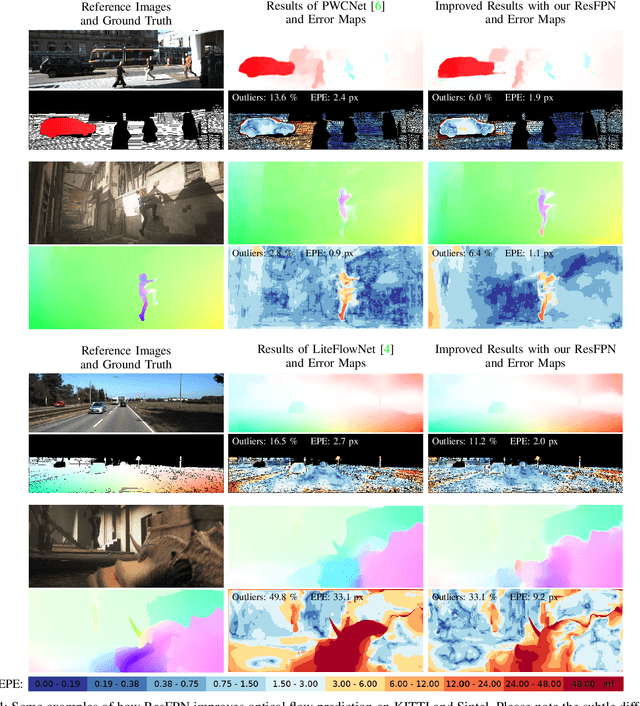
Dense pixel matching is required for many computer vision algorithms such as disparity, optical flow or scene flow estimation. Feature Pyramid Networks (FPN) have proven to be a suitable feature extractor for CNN-based dense matching tasks. FPN generates well localized and semantically strong features at multiple scales. However, the generic FPN is not utilizing its full potential, due to its reasonable but limited localization accuracy. Thus, we present ResFPN -- a multi-resolution feature pyramid network with multiple residual skip connections, where at any scale, we leverage the information from higher resolution maps for stronger and better localized features. In our ablation study, we demonstrate the effectiveness of our novel architecture with clearly higher accuracy than FPN. In addition, we verify the superior accuracy of ResFPN in many different pixel matching applications on established datasets like KITTI, Sintel, and FlyingThings3D.