 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIs the Rush to Machine Learning Jeopardizing Safety? Results of a Survey
Nov 29, 2021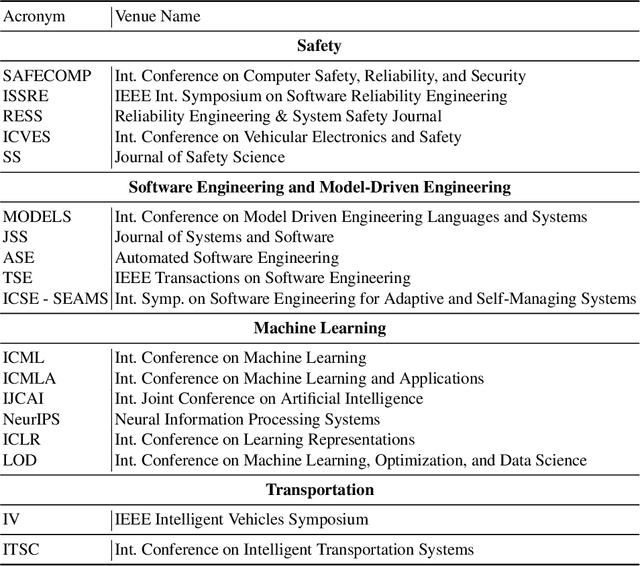
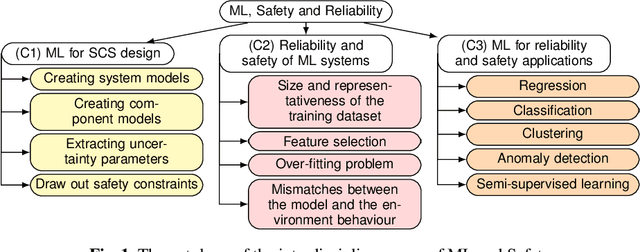
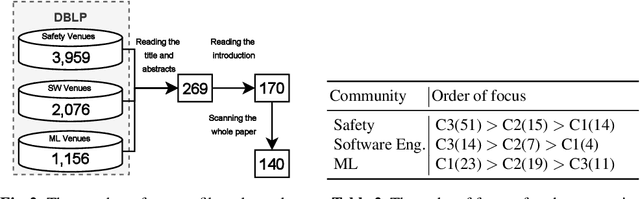
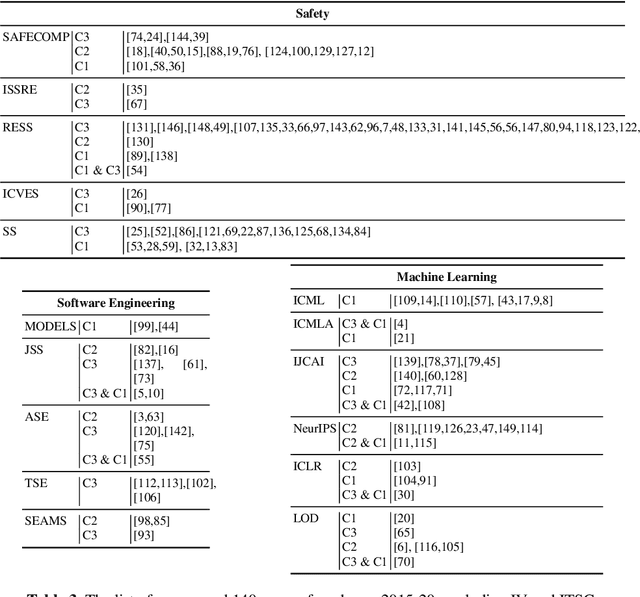
Machine learning (ML) is finding its way into safety-critical systems (SCS). Current safety standards and practice were not designed to cope with ML techniques, and it is difficult to be confident that SCSs that contain ML components are safe. Our hypothesis was that there has been a rush to deploy ML techniques at the expense of a thorough examination as to whether the use of ML techniques introduces safety problems that we are not yet adequately able to detect and mitigate against. We thus conducted a targeted literature survey to determine the research effort that has been expended in applying ML to SCS compared with that spent on evaluating the safety of SCSs that deploy ML components. This paper presents the (surprising) results of the survey.
Supporting Robotic Software Migration Using Static Analysis and Model-Driven Engineering
Aug 05, 2020



The wide use of robotic systems contributed to developing robotic software highly coupled to the hardware platform running the robotic system. Due to increased maintenance cost or changing business priorities, the robotic hardware is infrequently upgraded, thus increasing the risk for technology stagnation. Reducing this risk entails migrating the system and its software to a new hardware platform. Conventional software engineering practices such as complete re-development and code-based migration, albeit useful in mitigating these obsolescence issues, they are time-consuming and overly expensive. Our RoboSMi model-driven approach supports the migration of the software controlling a robotic system between hardware platforms. First, RoboSMi executes static analysis on the robotic software of the source hardware platform to identify platform-dependent and platform-agnostic software constructs. By analysing a model that expresses the architecture of robotic components on the target platform, RoboSMi establishes the hardware configuration of those components and suggests software libraries for each component whose execution will enable the robotic software to control the components. Finally, RoboSMi through code-generation produces software for the target platform and indicates areas that require manual intervention by robotic engineers to complete the migration. We evaluate the applicability of RoboSMi and analyse the level of automation and performance provided from its use by migrating two robotic systems deployed for an environmental monitoring and a line following mission from a Propeller Activity Board to an Arduino Uno.