 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Dynamic Control of Tendon-Driven Continuum Robots using Clarke Transform
Mar 26, 2025



In this paper, we propose a dynamic model and control framework for tendon-driven continuum robots with multiple segments and an arbitrary number of tendons per segment. Our approach leverages the Clarke transform, the Euler-Lagrange formalism, and the piecewise constant curvature assumption to formulate a dynamic model on a two-dimensional manifold embedded in the joint space that inherently satisfies tendon constraints. We present linear controllers that operate directly on this manifold, along with practical methods for preventing negative tendon forces without compromising control fidelity. We validate these approaches in simulation and on a physical prototype with one segment and five tendons, demonstrating accurate dynamic behavior and robust trajectory tracking under real-time conditions.
Displacement-Actuated Continuum Robots: A Joint Space Abstraction
Mar 21, 2025



The displacement-actuated continuum robot as an abstraction has been shown as a key abstraction to significantly simplify and improve approaches due to its relation to the Clarke transform. To highlight further potentials, we revisit and extend this abstraction that features an increasingly popular length extension and an underutilized twisting. For each extension, the corresponding mapping from the joint values to the local coordinates of the manifold embedded in the joint spaces is provided. Each mapping is characterized by its compactness and linearity.
Clarke Coordinates Are Generalized Improved State Parametrization for Continuum Robots
Mar 15, 2025In this letter, we demonstrate that previously proposed improved state parameterizations for soft and continuum robots are specific cases of Clarke coordinates. By explicitly deriving these improved parameterizations from a generalized Clarke transformation matrix, we unify various approaches into one comprehensive mathematical framework. This unified representation provides clarity regarding their relationships and generalizes them beyond existing constraints, including arbitrary joint numbers, joint distributions, and underlying modeling assumptions. This unification consolidates prior insights and establishes Clarke coordinates as a foundational tool, enabling systematic knowledge transfer across different subfields within soft and continuum robotics.
Using Clarke Transform to Create a Framework on the Manifold: From Sampling via Trajectory Generation to Control
Dec 21, 2024We present a framework based on Clarke coordinates for spatial displacement-actuated continuum robots with an arbitrary number of joints. This framework consists of three modular components, i.e., a planner, trajectory generator, and controller defined on the manifold. All components are computationally efficient, compact, and branchless, and an encoder can be used to interface existing framework components that are not based on Clarke coordinates. We derive the relationship between the kinematic constraints in the joint space and on the manifold to generate smooth trajectories on the manifold. Furthermore, we establish the connection between the displacement constraint and parallel curves. To demonstrate its effectiveness, a demonstration in simulation for a displacement-actuated continuum robot with four segments is presented.
Clarke Transform and Encoder-Decoder Architecture for Arbitrary Joints Locations in Displacement-Actuated Continuum Robots
Dec 20, 2024In this paper, we consider an arbitrary number of joints and their arbitrary joint locations along the center line of a displacement-actuated continuum robot. To achieve this, we revisit the derivation of the Clarke transform leading to a formulation capable of considering arbitrary joint locations. The proposed modified Clarke transform opens new opportunities in mechanical design and algorithmic approaches beyond the current limiting dependency on symmetric arranged joint locations. By presenting an encoder-decoder architecture based on the Clarke transform, joint values between different robot designs can be transformed enabling the use of an analogous robot design and direct knowledge transfer. To demonstrate its versatility, applications of control and trajectory generation in simulation are presented, which can be easily integrated into an existing framework designed, for instance, for three symmetric arranged joints.
Clarke Transform and Clarke Coordinates -- A New Kid on the Block for State Representation of Continuum Robots
Sep 20, 2024For almost all tendon-driven continuum robots, a segment is actuated by three or four tendons constrained by its mechanical design. For both cases, methods to account for the constraints are known. However, for an arbitrary number of tendons, a disentanglement method has yet to be formulated. Motivated by this unsolved general case, we explored state representations and exploited the two-dimensional manifold. We found that the Clarke transformation, a mathematical transformation used in vector control, can be generalized to address this problem. We present the Clarke transform and Clarke coordinates, which can be used to overcome the troublesome interdependency between the tendons, simplify modeling, and unify different improved state representations. Further connection to arc parameters leads to the possibility to derive more generalizable approaches applicable to a wider range of robot types.
On the Disentanglement of Tube Inequalities in Concentric Tube Continuum Robots
Feb 19, 2024Concentric tube continuum robots utilize nested tubes, which are subject to a set of inequalities. Current approaches to account for inequalities rely on branching methods such as if-else statements. It can introduce discontinuities, may result in a complicated decision tree, has a high wall-clock time, and cannot be vectorized. This affects the behavior and result of downstream methods in control, learning, workspace estimation, and path planning, among others. In this paper, we investigate a mapping to mitigate branching methods. We derive a lower triangular transformation matrix to disentangle the inequalities and provide proof for the unique existence. It transforms the interdependent inequalities into independent box constraints. Further investigations are made for sampling, control, and workspace estimation. Approaches utilizing the proposed mapping are at least 14 times faster (up to 176 times faster), generate always valid joint configurations, are more interpretable, and are easier to extend.
Open Continuum Robotics -- One Actuation Module to Create them All
Apr 24, 2023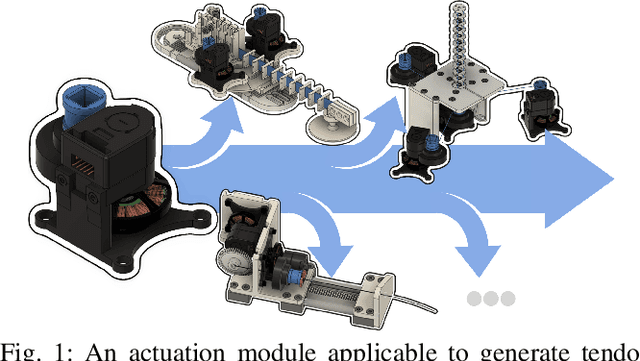
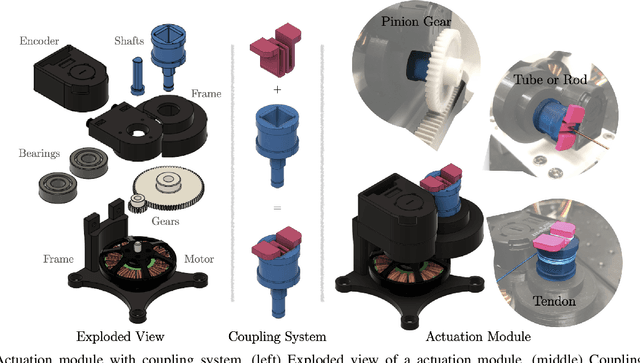
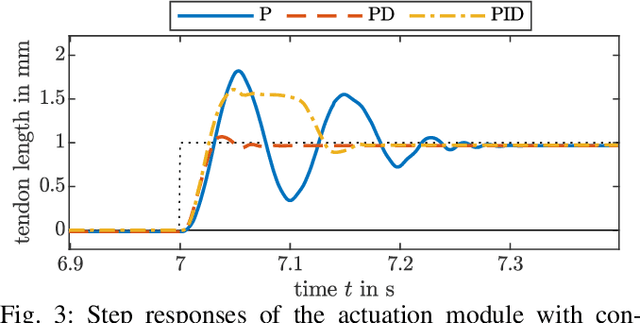
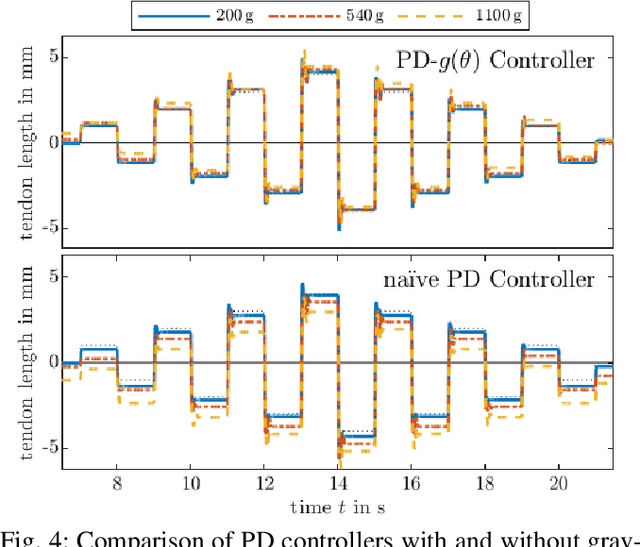
Experiments on physical continuum robot are the gold standard for evaluations. Currently, as no commercial continuum robot platform is available, a large variety of early-stage prototypes exists. These prototypes are developed by individual research groups and are often used for a single publication. Thus, a significant amount of time is devoted to creating proprietary hardware and software hindering the development of a common platform, and shifting away scarce time and efforts from the main research challenges. We address this problem by proposing an open-source actuation module, which can be used to build different types of continuum robots. It consists of a high-torque brushless electric motor, a high resolution optical encoder, and a low-gear-ratio transmission. For this letter, we create three different types of continuum robots. In addition, we illustrate, for the first time, that continuum robots built with our actuation module can proprioceptively detect external forces. Consequently, our approach opens untapped and under-investigated research directions related to the dynamics and advanced control of continuum robots, where sensing the generalized flow and effort is mandatory. Besides that, we democratize continuum robots research by providing open-source software and hardware with our initiative called the Open Continuum Robotics Project, to increase the accessibility and reproducibility of advanced methods.