 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing Design and Control of Running Robots Abstracted as Torque Driven Spring Loaded Inverted Pendulum (TD-SLIP)
Jul 16, 2024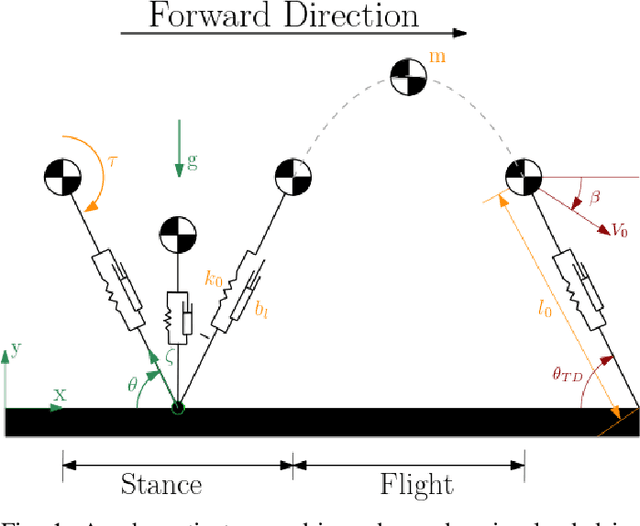
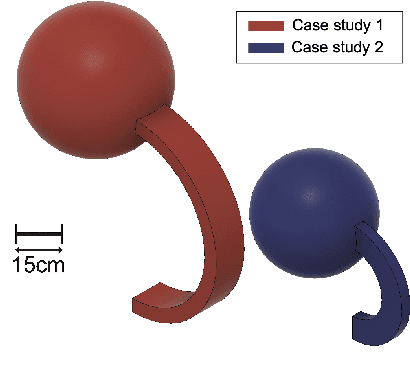
Legged locomotion shows promise for running in complex, unstructured environments. Designing such legged robots requires considering heterogeneous, multi-domain constraints and variables, from mechanical hardware and geometry choices to controller profiles. However, very few formal or systematic (as opposed to ad hoc) design formulations and frameworks exist to identify feasible and robust running platforms, especially at the small (sub 500 g) scale. This critical gap in running legged robot design is addressed here by abstracting the motion of legged robots through a torque-driven spring-loaded inverted pendulum (TD-SLIP) model, and deriving constraints that result in stable cyclic forward locomotion in the presence of system noise. Synthetic noise is added to the initial state in candidate design evaluation to simulate accumulated errors in an open-loop control. The design space was defined in terms of morphological parameters, such as the leg properties and system mass, actuator selection, and an open loop voltage profile. These attributes were optimized with a well-known particle swarm optimization solver that can handle mixed-discrete variables. Two separate case studies minimized the difference in touchdown angle from stride to stride and the actuation energy, respectively. Both cases resulted in legged robot designs with relatively repeatable and stable dynamics, while presenting distinct geometry and controller profile choices.