 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLocaliseBot: Multi-view 3D object localisation with differentiable rendering for robot grasping
Nov 14, 2023Robot grasp typically follows five stages: object detection, object localisation, object pose estimation, grasp pose estimation, and grasp planning. We focus on object pose estimation. Our approach relies on three pieces of information: multiple views of the object, the camera's extrinsic parameters at those viewpoints, and 3D CAD models of objects. The first step involves a standard deep learning backbone (FCN ResNet) to estimate the object label, semantic segmentation, and a coarse estimate of the object pose with respect to the camera. Our novelty is using a refinement module that starts from the coarse pose estimate and refines it by optimisation through differentiable rendering. This is a purely vision-based approach that avoids the need for other information such as point cloud or depth images. We evaluate our object pose estimation approach on the ShapeNet dataset and show improvements over the state of the art. We also show that the estimated object pose results in 99.65% grasp accuracy with the ground truth grasp candidates on the Object Clutter Indoor Dataset (OCID) Grasp dataset, as computed using standard practice.
BCI-Controlled Hands-Free Wheelchair Navigation with Obstacle Avoidance
May 08, 2020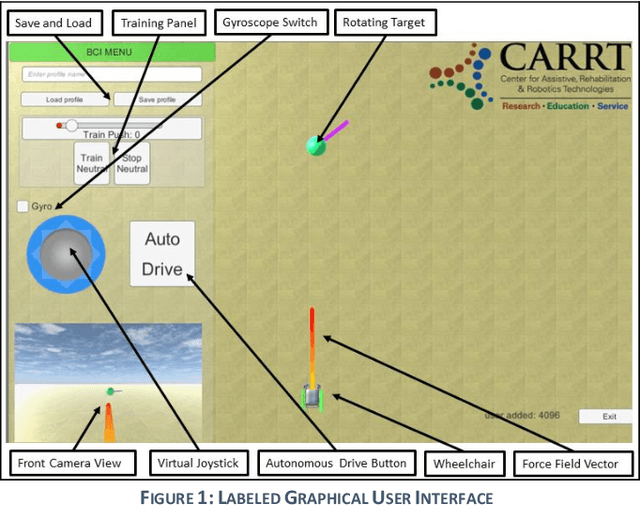
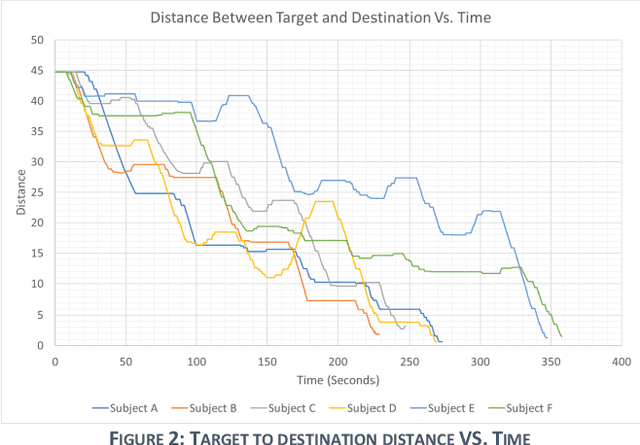
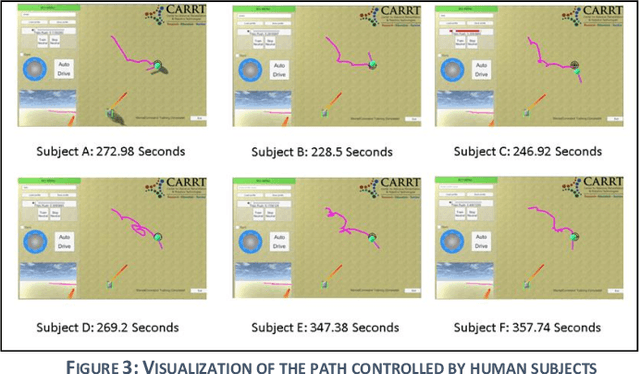
Brain-Computer interfaces (BCI) are widely used in reading brain signals and converting them into real-world motion. However, the signals produced from the BCI are noisy and hard to analyze. This paper looks specifically towards combining the BCI's latest technology with ultrasonic sensors to provide a hands-free wheelchair that can efficiently navigate through crowded environments. This combination provides safety and obstacle avoidance features necessary for the BCI Navigation system to gain more confidence and operate the wheelchair at a relatively higher velocity. A population of six human subjects tested the BCI-controller and obstacle avoidance features. Subjects were able to mentally control the destination of the wheelchair, by moving the target from the starting position to a predefined position, in an average of 287.12 seconds and a standard deviation of 48.63 seconds after 10 minutes of training. The wheelchair successfully avoided all obstacles placed by the subjects during the test.