 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWGAST: Weakly-Supervised Generative Network for Daily 10 m Land Surface Temperature Estimation via Spatio-Temporal Fusion
Aug 08, 2025Urbanization, climate change, and agricultural stress are increasing the demand for precise and timely environmental monitoring. Land Surface Temperature (LST) is a key variable in this context and is retrieved from remote sensing satellites. However, these systems face a trade-off between spatial and temporal resolution. While spatio-temporal fusion methods offer promising solutions, few have addressed the estimation of daily LST at 10 m resolution. In this study, we present WGAST, a Weakly-Supervised Generative Network for Daily 10 m LST Estimation via Spatio-Temporal Fusion of Terra MODIS, Landsat 8, and Sentinel-2. WGAST is the first end-to-end deep learning framework designed for this task. It adopts a conditional generative adversarial architecture, with a generator composed of four stages: feature extraction, fusion, LST reconstruction, and noise suppression. The first stage employs a set of encoders to extract multi-level latent representations from the inputs, which are then fused in the second stage using cosine similarity, normalization, and temporal attention mechanisms. The third stage decodes the fused features into high-resolution LST, followed by a Gaussian filter to suppress high-frequency noise. Training follows a weakly supervised strategy based on physical averaging principles and reinforced by a PatchGAN discriminator. Experiments demonstrate that WGAST outperforms existing methods in both quantitative and qualitative evaluations. Compared to the best-performing baseline, on average, WGAST reduces RMSE by 17.18% and improves SSIM by 11.00%. Furthermore, WGAST is robust to cloud-induced LST and effectively captures fine-scale thermal patterns, as validated against 33 ground-based sensors. The code is available at https://github.com/Sofianebouaziz1/WGAST.git.
Loss-Guided Model Sharing and Local Learning Correction in Decentralized Federated Learning for Crop Disease Classification
May 29, 2025Crop disease detection and classification is a critical challenge in agriculture, with major implications for productivity, food security, and environmental sustainability. While deep learning models such as CNN and ViT have shown excellent performance in classifying plant diseases from images, their large-scale deployment is often limited by data privacy concerns. Federated Learning (FL) addresses this issue, but centralized FL remains vulnerable to single-point failures and scalability limits. In this paper, we introduce a novel Decentralized Federated Learning (DFL) framework that uses validation loss (Loss_val) both to guide model sharing between peers and to correct local training via an adaptive loss function controlled by weighting parameter. We conduct extensive experiments using PlantVillage datasets with three deep learning architectures (ResNet50, VGG16, and ViT_B16), analyzing the impact of weighting parameter, the number of shared models, the number of clients, and the use of Loss_val versus Loss_train of other clients. Results demonstrate that our DFL approach not only improves accuracy and convergence speed, but also ensures better generalization and robustness across heterogeneous data environments making it particularly well-suited for privacy-preserving agricultural applications.
Enhancing DeepLabV3+ to Fuse Aerial and Satellite Images for Semantic Segmentation
Mar 28, 2025Aerial and satellite imagery are inherently complementary remote sensing sources, offering high-resolution detail alongside expansive spatial coverage. However, the use of these sources for land cover segmentation introduces several challenges, prompting the development of a variety of segmentation methods. Among these approaches, the DeepLabV3+ architecture is considered as a promising approach in the field of single-source image segmentation. However, despite its reliable results for segmentation, there is still a need to increase its robustness and improve its performance. This is particularly crucial for multimodal image segmentation, where the fusion of diverse types of information is essential. An interesting approach involves enhancing this architectural framework through the integration of novel components and the modification of certain internal processes. In this paper, we enhance the DeepLabV3+ architecture by introducing a new transposed conventional layers block for upsampling a second entry to fuse it with high level features. This block is designed to amplify and integrate information from satellite images, thereby enriching the segmentation process through fusion with aerial images. For experiments, we used the LandCover.ai (Land Cover from Aerial Imagery) dataset for aerial images, alongside the corresponding dataset sourced from Sentinel 2 data. Through the fusion of both sources, the mean Intersection over Union (mIoU) achieved a total mIoU of 84.91% without data augmentation.
Deep Learning for Spatio-Temporal Fusion in Land Surface Temperature Estimation: A Comprehensive Survey, Experimental Analysis, and Future Trends
Dec 21, 2024



The rapid advancements in satellite remote sensing have enhanced the capability to monitor and analyze the Earth's surface. Among the many variables captured through satellite sensors, Land Surface Temperature (LST) plays a critical role in understanding key environmental processes. However, obtaining high-resolution LST data remains a challenge, as satellite sensors often face a trade-off between spatial and temporal resolutions. In response, Spatio-Temporal Fusion (STF) has emerged as a powerful method to integrate two satellite data sources, one providing high spatial but low temporal resolution, and the other offering high temporal but low spatial resolution. Although a range of STF techniques have been proposed, from traditional methods to cutting-edge deep learning (DL) models, most have focused on surface reflectance, with limited application to LST estimation. DL approaches, in particular, show promise in improving the spatial and temporal resolutions of LST by capturing complex, non-linear relationships between input and output LST data. This paper offers a comprehensive review of the latest advancements in DL-based STF techniques for LST estimation. We analyze key research developments, mathematically formulate the STF problem, and introduce a novel taxonomy for DL-based STF methods. Furthermore, we discuss the challenges faced by current methods and highlight future research directions. In addition, we present the first open-source benchmark STF dataset for LST estimation, consisting of 51 pairs of MODIS-Landsat images spanning from 2013 to 2024. To support our findings, we conduct extensive experiments on state-of-the-art methods and present both quantitative and qualitative assessments. This is the first survey paper focused on DL-based STF for LST estimation. We hope it serves as a valuable reference for researchers and paves the way for future research in this field.
Generative models-based data labeling for deep networks regression: application to seed maturity estimation from UAV multispectral images
Aug 09, 2022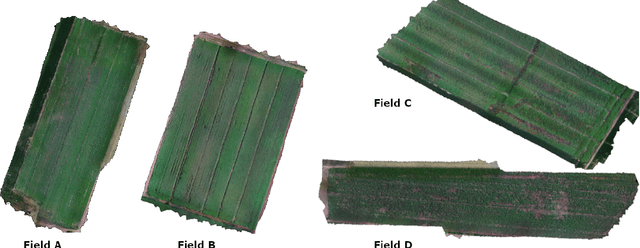

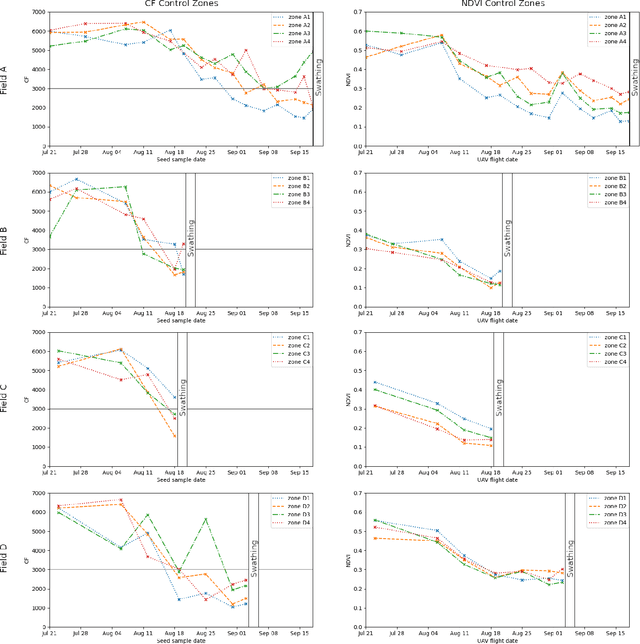
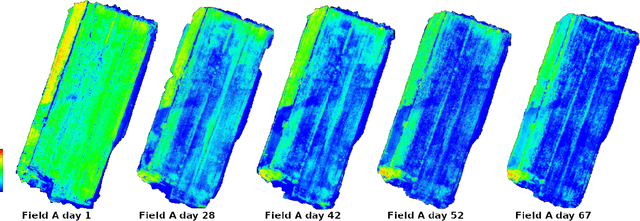
Monitoring seed maturity is an increasing challenge in agriculture due to climate change and more restrictive practices. Seeds monitoring in the field is essential to optimize the farming process and to guarantee yield quality through high germination. Traditional methods are based on limited sampling in the field and analysis in laboratory. Moreover, they are time consuming and only allow monitoring sub-sections of the crop field. This leads to a lack of accuracy on the condition of the crop as a whole due to intra-field heterogeneities. Multispectral imagery by UAV allows uniform scan of fields and better capture of crop maturity information. On the other hand, deep learning methods have shown tremendous potential in estimating agronomic parameters, especially maturity. However, they require large labeled datasets. Although large sets of aerial images are available, labeling them with ground truth is a tedious, if not impossible task. In this paper, we propose a method for estimating parsley seed maturity using multispectral UAV imagery, with a new approach for automatic data labeling. This approach is based on parametric and non-parametric models to provide weak labels. We also consider the data acquisition protocol and the performance evaluation of the different steps of the method. Results show good performance, and the non-parametric kernel density estimator model can improve neural network generalization when used as a labeling method, leading to more robust and better performing deep neural models.
Vision Transformers For Weeds and Crops Classification Of High Resolution UAV Images
Sep 06, 2021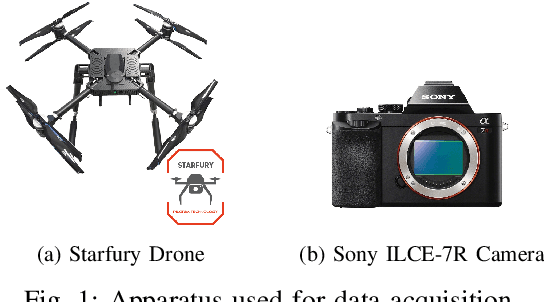
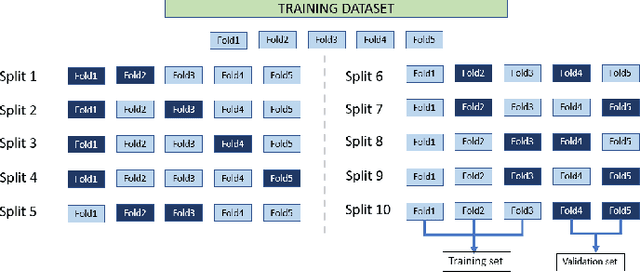
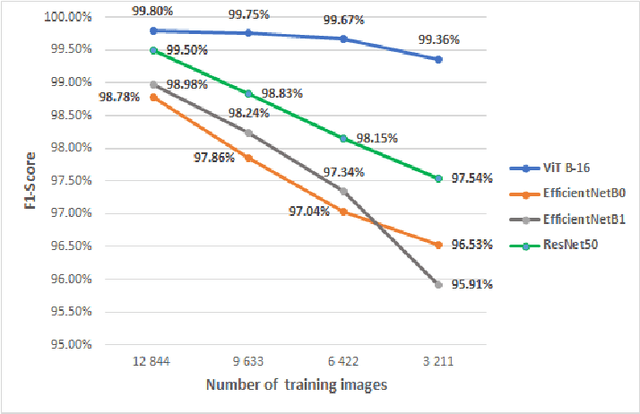
Crop and weed monitoring is an important challenge for agriculture and food production nowadays. Thanks to recent advances in data acquisition and computation technologies, agriculture is evolving to a more smart and precision farming to meet with the high yield and high quality crop production. Classification and recognition in Unmanned Aerial Vehicles (UAV) images are important phases for crop monitoring. Advances in deep learning models relying on Convolutional Neural Network (CNN) have achieved high performances in image classification in the agricultural domain. Despite the success of this architecture, CNN still faces many challenges such as high computation cost, the need of large labelled datasets, ... Natural language processing's transformer architecture can be an alternative approach to deal with CNN's limitations. Making use of the self-attention paradigm, Vision Transformer (ViT) models can achieve competitive or better results without applying any convolution operations. In this paper, we adopt the self-attention mechanism via the ViT models for plant classification of weeds and crops: red beet, off-type beet (green leaves), parsley and spinach. Our experiments show that with small set of labelled training data, ViT models perform better compared to state-of-the-art CNN-based models EfficientNet and ResNet, with a top accuracy of 99.8\% achieved by the ViT model.
Deep Learning with unsupervised data labeling for weeds detection on UAV images
May 31, 2018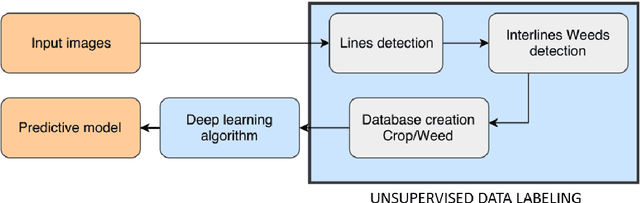



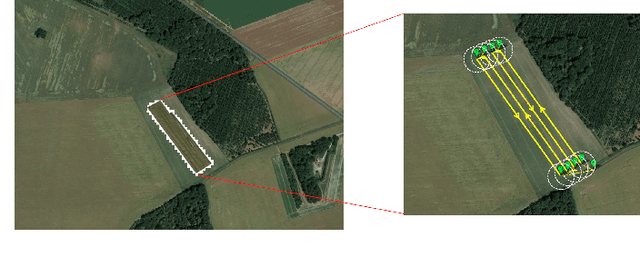
In modern agriculture, usually weeds control consists in spraying herbicides all over the agricultural field. This practice involves significant waste and cost of herbicide for farmers and environmental pollution. One way to reduce the cost and environmental impact is to allocate the right doses of herbicide at the right place and at the right time (Precision Agriculture). Nowadays, Unmanned Aerial Vehicle (UAV) is becoming an interesting acquisition system for weeds localization and management due to its ability to obtain the images of the entire agricultural field with a very high spatial resolution and at low cost. Despite the important advances in UAV acquisition systems, automatic weeds detection remains a challenging problem because of its strong similarity with the crops. Recently Deep Learning approach has shown impressive results in different complex classification problem. However, this approach needs a certain amount of training data but, creating large agricultural datasets with pixel-level annotations by expert is an extremely time consuming task. In this paper, we propose a novel fully automatic learning method using Convolutional Neuronal Networks (CNNs) with unsupervised training dataset collection for weeds detection from UAV images. The proposed method consists in three main phases. First we automatically detect the crop lines and using them to identify the interline weeds. In the second phase, interline weeds are used to constitute the training dataset. Finally, we performed CNNs on this dataset to build a model able to detect the crop and weeds in the images. The results obtained are comparable to the traditional supervised training data labeling. The accuracy gaps are 1.5% in the spinach field and 6% in the bean field.