 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCharacterization and Thermal Management of a DC Motor-Driven Resonant Actuator for Miniature Mobile Robots with Oscillating Limbs
Jan 24, 2020
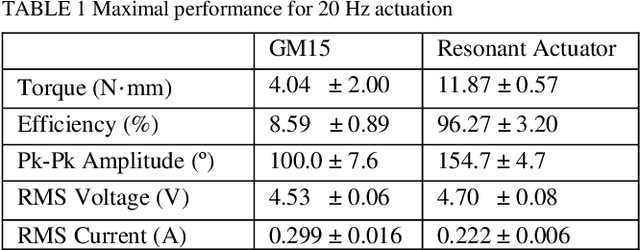

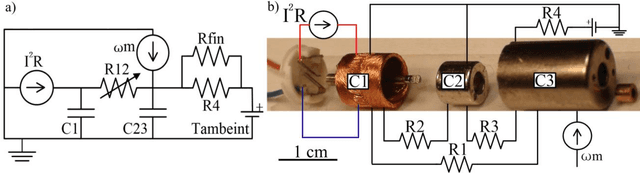
In this paper, we characterize the performance of and develop thermal management solutions for a DC motor-driven resonant actuator developed for flapping wing micro air vehicles. The actuator, a DC micro-gearmotor connected in parallel with a torsional spring, drives reciprocal wing motion. Compared to the gearmotor alone, this design increased torque and power density by 161.1% and 666.8%, respectively, while decreasing the drawn current by 25.8%. Characterization of the actuator, isolated from nonlinear aerodynamic loading, results in standard metrics directly comparable to other actuators. The micro-motor, selected for low weight considerations, operates at high power for limited duration due to thermal effects. To predict system performance, a lumped parameter thermal circuit model was developed. Critical model parameters for this micro-motor, two orders of magnitude smaller than those previously characterized, were identified experimentally. This included the effects of variable winding resistance, bushing friction, speed-dependent forced convection, and the addition of a heatsink. The model was then used to determine a safe operation envelope for the vehicle and to design a weight-optimal heatsink. This actuator design and thermal modeling approach could be applied more generally to improve the performance of any miniature mobile robot or device with motor-driven oscillating limbs or loads.
Bio-inspired Flexible Twisting Wings Increase Lift and Efficiency of a Flapping Wing Micro Air Vehicle
Jan 24, 2020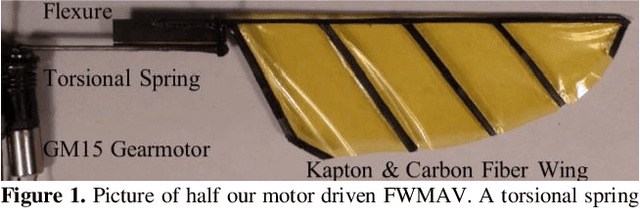


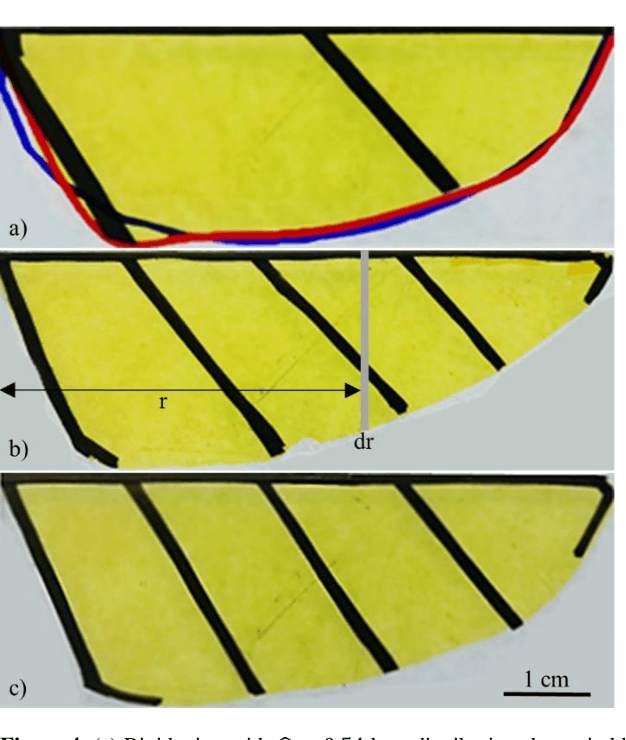
We investigate the effect of wing twist flexibility on lift and efficiency of a flapping-wing micro air vehicle capable of liftoff. Wings used previously were chosen to be fully rigid due to modeling and fabrication constraints. However, biological wings are highly flexible and other micro air vehicles have successfully utilized flexible wing structures for specialized tasks. The goal of our study is to determine if dynamic twisting of flexible wings can increase overall aerodynamic lift and efficiency. A flexible twisting wing design was found to increase aerodynamic efficiency by 41.3%, translational lift production by 35.3%, and the effective lift coefficient by 63.7% compared to the rigid-wing design. These results exceed the predictions of quasi-steady blade element models, indicating the need for unsteady computational fluid dynamics simulations of twisted flapping wings.