 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFillet-based RRT*: A Rapid Convergence Implementation of RRT* for Curvature Constrained Vehicles
Feb 22, 2023Rapidly exploring random trees (RRTs) have proven effective in quickly finding feasible solutions to complex motion planning problems. RRT* is an extension of the RRT algorithm that provides probabilistic asymptotic optimality guarantees when using straight-line motion primitives. This work provides extensions to RRT and RRT* that employ fillets as motion primitives, allowing path curvature constraints to be considered when planning. Two fillets are developed, an arc-based fillet that uses circular arcs to generate paths that respect maximum curvature constraints and a spline-based fillet that uses Bezier curves to additionally respect curvature continuity requirements. Planning with these fillets is shown to far exceed the performance of RRT* using Dubin's path motion primitives, approaching the performance of planning with straight-line path primitives. Path sampling heuristics are also introduced to accelerate convergence for nonholonomic motion planning. Comparisons to established RRT* approaches are made using the Open Motion Planning Library (OMPL).
Sensitivity Study of Fiducial-Aided Navigation of Unmanned Aerial Vehicles
Oct 04, 2021


The possible applications and benefits of autonomous Unmanned Aerial Vehicle (UAV) use in urban areas are gaining considerable attention. Before these possibilities can be realized, it is essential that UAVs be able to navigate reliably and precisely in urban environments. The most common means of determining the location of a UAV is to utilize position measurements from Global Navigation Satellite Systems (GNSS). In urban environments, however, GNSS measurements are significantly degraded due to occlusions and multipath. This research analyzes the use of camera Line-of-Sight (LOS) measurements to self-describing fiducials as a replacement for conventional GNSS measurements. An extended Kalman filter (EKF) is developed and validated for the purpose of combining continuous measurements from an Inertial Measurement Unit (IMU) with the discrete LOS measurements to accurately estimate the states of a UAV. The sensitivity of the estimation error covariance to various system parameters is assessed, including IMU grade, fiducial placement, vehicle altitude, and image processing frequency.
A Closed-Loop Linear Covariance Framework for Vehicle Path Planning in an Uncertain Obstacle Field
May 25, 2021



Path planning in uncertain environments is a key enabler of true vehicle autonomy. Over the past two decades, numerous approaches have been developed to account for errors in the vehicle path while navigating complex and often uncertain environments. An important capability of such planning is the prediction of vehicle dispersion covariances about candidate paths. This work develops a new closed-loop linear covariance (CL-LinCov) framework applicable to wide range of autonomous system architectures. Extensions to current CL-LinCov frameworks are made to accommodate 1) the cascaded architecture typical of autonomous vehicles and 2) the dual-use of continuous sensor information for both navigation and control. The closed-loop nature of the framework preserves the important coupling between the system dynamics, exogenous disturbances, and the guidance, navigation, and control algorithms. The developed framework is applied to a simplified model of an unmanned aerial vehicle and validated by comparison via Monte Carlo analysis. The utility of the CL-LinCov information is illustrated by its application to path planning in an uncertain obstacle field via a modified version of the rapidly exploring random tree algorithm.
GPS-Denied Navigation Using SAR Images and Neural Networks
Oct 22, 2020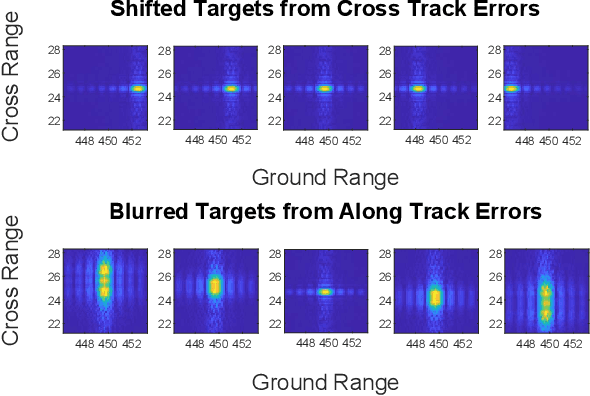
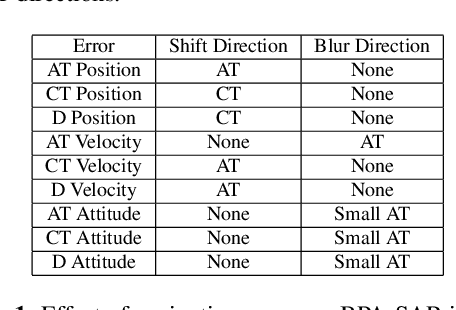
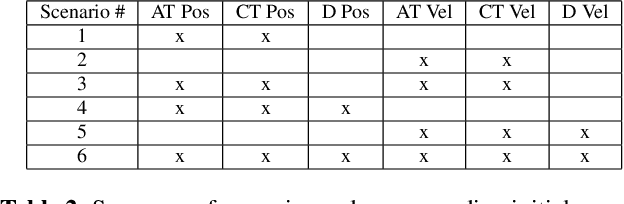
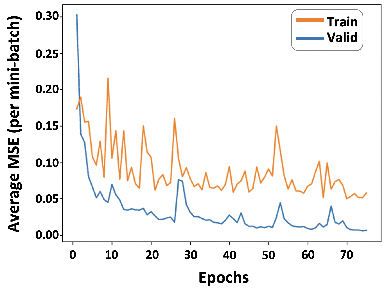
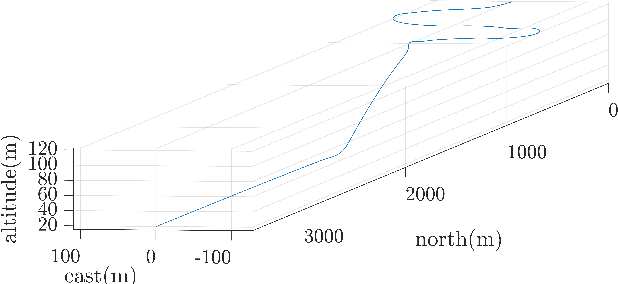
Unmanned aerial vehicles (UAV) often rely on GPS for navigation. GPS signals, however, are very low in power and easily jammed or otherwise disrupted. This paper presents a method for determining the navigation errors present at the beginning of a GPS-denied period utilizing data from a synthetic aperture radar (SAR) system. This is accomplished by comparing an online-generated SAR image with a reference image obtained a priori. The distortions relative to the reference image are learned and exploited with a convolutional neural network to recover the initial navigational errors, which can be used to recover the true flight trajectory throughout the synthetic aperture. The proposed neural network approach is able to learn to predict the initial errors on both simulated and real SAR image data.
Zero-Error Tracking for Autonomous Vehicles through Epsilon-Trajectory Generation
Jul 20, 2020



This paper presents a control method and trajectory planner for vehicles with first-order nonholonomic constraints that guarantee asymptotic convergence to a time-indexed trajectory. To overcome the nonholonomic constraint, a fixed point in front of the vehicle can be controlled to track a desired trajectory, albeit with a steady-state error. To eliminate steady state error, a sufficiently smooth trajectory is reformulated for the new reference point such that, when tracking the new trajectory, the vehicle asymptotically converges to the original trajectory. The resulting zero-error tracking law is demonstrated through a novel framework for creating time-indexed Clothoids. The Clothoids can be planned to pass through arbitrary waypoints using traditional methods yet result in trajectories that can be followed with zero steady-state error. The results of the control method and planner are illustrated in simulation wherein zero-error tracking is demonstrated.