 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSensitivity Study of Fiducial-Aided Navigation of Unmanned Aerial Vehicles
Oct 04, 2021

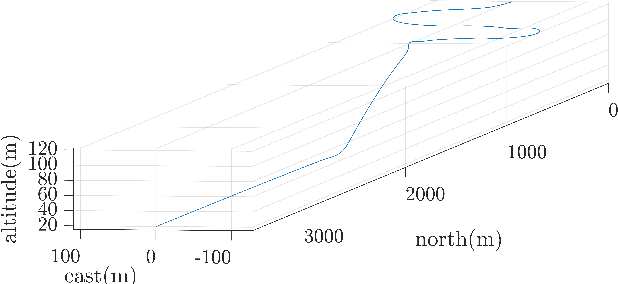

The possible applications and benefits of autonomous Unmanned Aerial Vehicle (UAV) use in urban areas are gaining considerable attention. Before these possibilities can be realized, it is essential that UAVs be able to navigate reliably and precisely in urban environments. The most common means of determining the location of a UAV is to utilize position measurements from Global Navigation Satellite Systems (GNSS). In urban environments, however, GNSS measurements are significantly degraded due to occlusions and multipath. This research analyzes the use of camera Line-of-Sight (LOS) measurements to self-describing fiducials as a replacement for conventional GNSS measurements. An extended Kalman filter (EKF) is developed and validated for the purpose of combining continuous measurements from an Inertial Measurement Unit (IMU) with the discrete LOS measurements to accurately estimate the states of a UAV. The sensitivity of the estimation error covariance to various system parameters is assessed, including IMU grade, fiducial placement, vehicle altitude, and image processing frequency.