 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDifferentiable Rendering for Pose Estimation in Proximity Operations
Dec 24, 2022



Differentiable rendering aims to compute the derivative of the image rendering function with respect to the rendering parameters. This paper presents a novel algorithm for 6-DoF pose estimation through gradient-based optimization using a differentiable rendering pipeline. We emphasize two key contributions: (1) instead of solving the conventional 2D to 3D correspondence problem and computing reprojection errors, images (rendered using the 3D model) are compared only in the 2D feature space via sparse 2D feature correspondences. (2) Instead of an analytical image formation model, we compute an approximate local gradient of the rendering process through online learning. The learning data consists of image features extracted from multi-viewpoint renders at small perturbations in the pose neighborhood. The gradients are propagated through the rendering pipeline for the 6-DoF pose estimation using nonlinear least squares. This gradient-based optimization regresses directly upon the pose parameters by aligning the 3D model to reproduce a reference image shape. Using representative experiments, we demonstrate the application of our approach to pose estimation in proximity operations.
NaRPA: Navigation and Rendering Pipeline for Astronautics
Nov 03, 2022



This paper presents Navigation and Rendering Pipeline for Astronautics (NaRPA) - a novel ray-tracing-based computer graphics engine to model and simulate light transport for space-borne imaging. NaRPA incorporates lighting models with attention to atmospheric and shading effects for the synthesis of space-to-space and ground-to-space virtual observations. In addition to image rendering, the engine also possesses point cloud, depth, and contour map generation capabilities to simulate passive and active vision-based sensors and to facilitate the designing, testing, or verification of visual navigation algorithms. Physically based rendering capabilities of NaRPA and the efficacy of the proposed rendering algorithm are demonstrated using applications in representative space-based environments. A key demonstration includes NaRPA as a tool for generating stereo imagery and application in 3D coordinate estimation using triangulation. Another prominent application of NaRPA includes a novel differentiable rendering approach for image-based attitude estimation is proposed to highlight the efficacy of the NaRPA engine for simulating vision-based navigation and guidance operations.
FPGA Hardware Acceleration for Feature-Based Relative Navigation Applications
Oct 18, 2022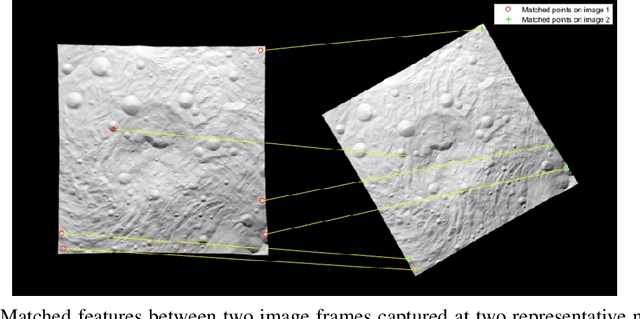
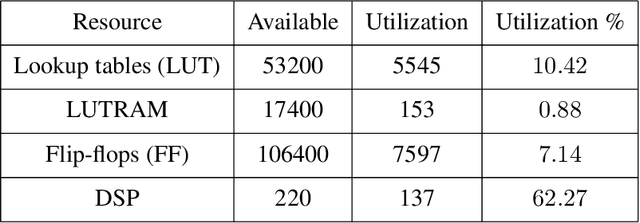
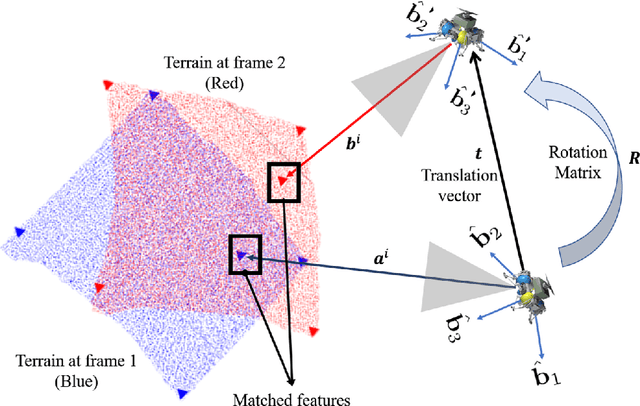
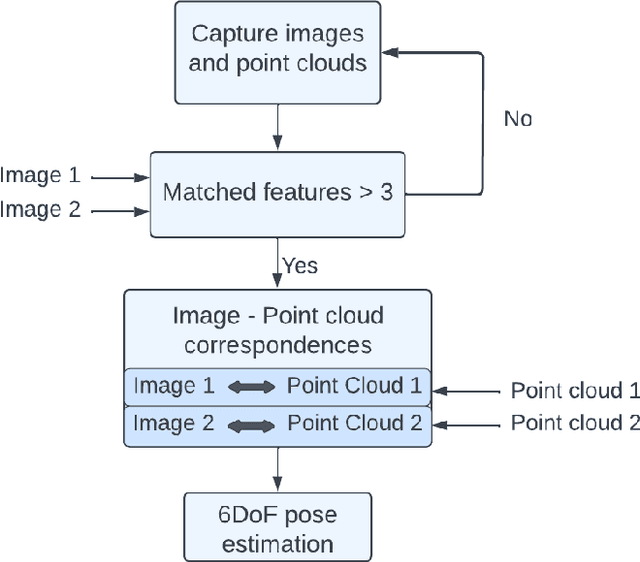
Estimation of rigid transformation between two point clouds is a computationally challenging problem in vision-based relative navigation. Targeting a real-time navigation solution utilizing point-cloud and image registration algorithms, this paper develops high-performance avionics for power and resource constrained pose estimation framework. A Field-Programmable Gate Array (FPGA) based embedded architecture is developed to accelerate estimation of relative pose between the point-clouds, aided by image features that correspond to the individual point sets. At algorithmic level, the pose estimation method is an adaptation of Optimal Linear Attitude and Translation Estimator (OLTAE) for relative attitude and translation estimation. At the architecture level, the proposed embedded solution is a hardware/software co-design that evaluates the OLTAE computations on the bare-metal hardware for high-speed state estimation. The finite precision FPGA evaluation of the OLTAE algorithm is compared with a double-precision evaluation on MATLAB for performance analysis and error quantification. Implementation results of the proposed finite-precision OLTAE accelerator demonstrate the high-performance compute capabilities of the FPGA-based pose estimation while offering relative numerical errors below 7%.
An FPGA framework for Interferometric Vision-Based Navigation (iVisNav)
Aug 07, 2022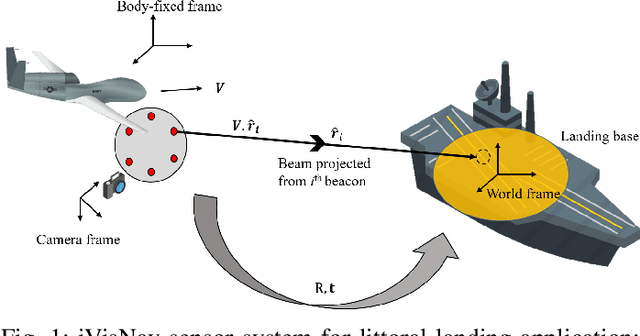
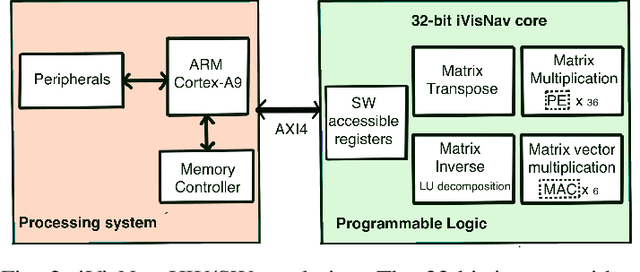
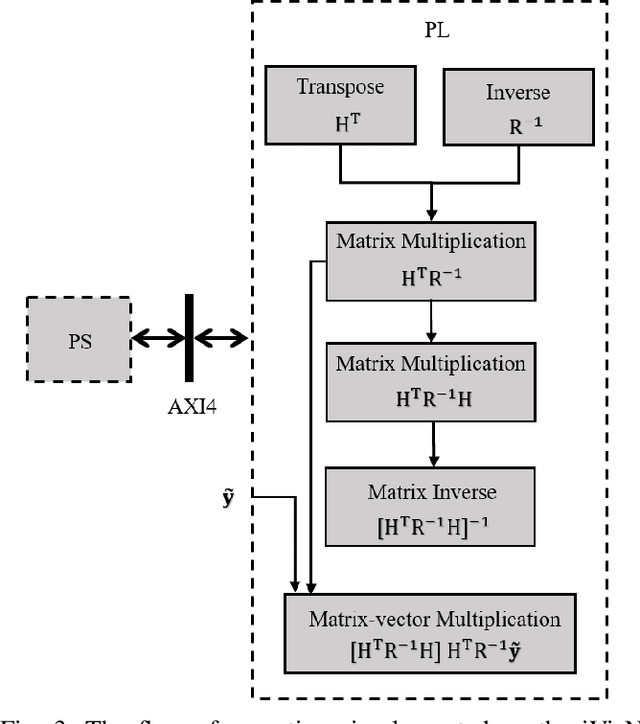
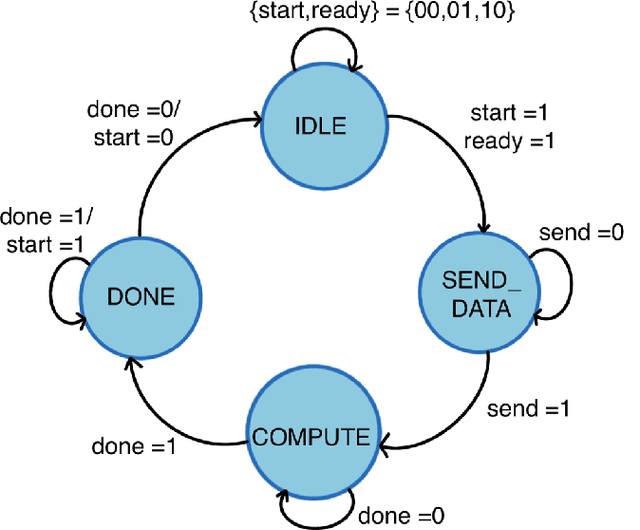
Interferometric Vision-Based Navigation (iVisNav) is a novel optoelectronic sensor for autonomous proximity operations. iVisNav employs laser emitting structured beacons and precisely characterizes six degrees of freedom relative motion rates by measuring changes in the phase of the transmitted laser pulses. iVisNav's embedded package must efficiently process high frequency dynamics for robust sensing and estimation. A new embedded system for least squares-based rate estimation is developed in this paper. The resulting system is capable of interfacing with the photonics and implement the estimation algorithm in a field-programmable gate array. The embedded package is shown to be a hardware/software co-design handling estimation procedure using finite precision arithmetic for high-speed computation. The accuracy of the finite precision FPGA hardware design is compared with the floating-point software evaluation of the algorithm on MATLAB to benchmark its performance and statistical consistency with the error measures. Implementation results demonstrate the utility of FPGA computing capabilities for high-speed proximity navigation using iVisNav.