 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComparison of Segmentation Methods in Remote Sensing for Land Use Land Cover
Jul 24, 2025Land Use Land Cover (LULC) mapping is essential for urban and resource planning, and is one of the key elements in developing smart and sustainable cities.This study evaluates advanced LULC mapping techniques, focusing on Look-Up Table (LUT)-based Atmospheric Correction applied to Cartosat Multispectral (MX) sensor images, followed by supervised and semi-supervised learning models for LULC prediction. We explore DeeplabV3+ and Cross-Pseudo Supervision (CPS). The CPS model is further refined with dynamic weighting, enhancing pseudo-label reliability during training. This comprehensive approach analyses the accuracy and utility of LULC mapping techniques for various urban planning applications. A case study of Hyderabad, India, illustrates significant land use changes due to rapid urbanization. By analyzing Cartosat MX images over time, we highlight shifts such as urban sprawl, shrinking green spaces, and expanding industrial areas. This demonstrates the practical utility of these techniques for urban planners and policymakers.
Performance Evaluation of Geospatial Images based on Zarr and Tiff
Nov 18, 2024This evaluate the performance of geospatial image processing using two distinct data storage formats: Zarr and TIFF. Geospatial images, converted to numerous applications like environmental monitoring, urban planning, and disaster management. Traditional Tagged Image File Format is mostly used because it is simple and compatible but may lack by performance limitations while working on large datasets. Zarr is a new format designed for the cloud systems,that offers scalability and efficient storage with data chunking and compression techniques. This study compares the two formats in terms of storage efficiency, access speed, and computational performance during typical geospatial processing tasks. Through analysis on a range of geospatial datasets, this provides details about the practical advantages and limitations of each format,helping users to select the appropriate format based on their specific needs and constraints.
An Atmospheric Correction Integrated LULC Segmentation Model for High-Resolution Satellite Imagery
Sep 10, 2024The integration of fine-scale multispectral imagery with deep learning models has revolutionized land use and land cover (LULC) classification. However, the atmospheric effects present in Top-of-Atmosphere sensor measured Digital Number values must be corrected to retrieve accurate Bottom-of-Atmosphere surface reflectance for reliable analysis. This study employs look-up-table-based radiative transfer simulations to estimate the atmospheric path reflectance and transmittance for atmospherically correcting high-resolution CARTOSAT-3 Multispectral (MX) imagery for several Indian cities. The corrected surface reflectance data were subsequently used in supervised and semi-supervised segmentation models, demonstrating stability in multi-class (buildings, roads, trees and water bodies) LULC segmentation accuracy, particularly in scenarios with sparsely labelled data.
Cross Pseudo Supervision Framework for Sparsely Labelled Geospatial Images
Aug 13, 2024


Land Use Land Cover (LULC) mapping is a vital tool for urban and resource planning, playing a key role in the development of innovative and sustainable cities. This study introduces a semi-supervised segmentation model for LULC prediction using high-resolution satellite images with a vast diversity of data distributions in different areas of India. Our approach ensures a robust generalization across different types of buildings, roads, trees, and water bodies within these distinct areas. We propose a modified Cross Pseudo Supervision framework to train image segmentation models on sparsely labelled data. The proposed framework addresses the limitations of the famous 'Cross Pseudo Supervision' technique for semi-supervised learning, specifically tackling the challenges of training segmentation models on noisy satellite image data with sparse and inaccurate labels. This comprehensive approach significantly enhances the accuracy and utility of LULC mapping, providing valuable insights for urban and resource planning applications.
Cross Psuedo Supervision Framework for Sparsely Labelled Geo-spatial Images
Aug 05, 2024Land Use Land Cover (LULC) mapping is essential for urban and resource planning and is one of the key elements in developing smart and sustainable cities. This study introduces a semi-supervised segmentation model for LULC prediction using high-resolution satellite images with a huge diversity in data distributions in different areas from the country of India. Our approach ensures a robust generalization across different types of buildings, roads, trees, and water bodies within these distinct areas. We propose a modified Cross Pseudo Supervision framework to train image segmentation models on sparsely labelled data. The proposed framework addresses the limitations of the popular "Cross Pseudo Supervision" technique for semi-supervised learning. Specifically, it tackles the challenges of training segmentation models on noisy satellite image data with sparse and inaccurate labels. This comprehensive approach enhances the accuracy and utility of LULC mapping for various urban planning applications.
Robust and Scalable Techniques for TWR and TDoA based localization using Ultra Wide Band Radios
Aug 10, 2020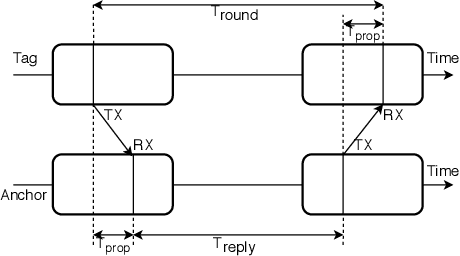
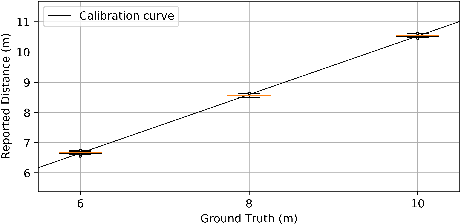
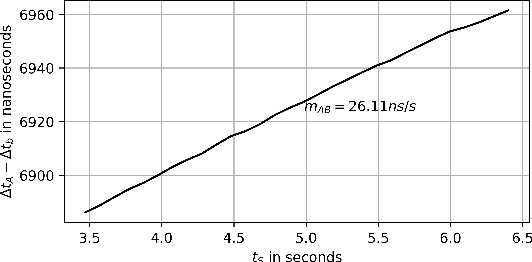
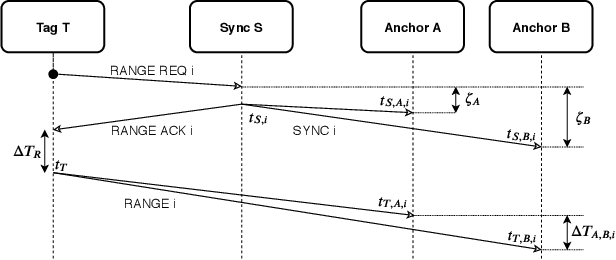
Current trends in autonomous vehicles and their applications indicates an increasing need in positioning at low battery and compute cost. Lidars provide accurate localization at the cost of high compute and power consumption which could be detrimental for drones. Modern requirements for autonomous drones such as No-Permit-No-Takeoff (NPNT) and applications restricting drones to a corridor require the infrastructure to constantly determine the location of the drone. Ultra Wide Band Radios (UWB) fulfill such requirements and offer high precision localization and fast position update rates at a fraction of the cost and battery consumption as compared to lidars and also have greater network availability than GPS in a dense forested campus or an indoor setting. We present in this paper a novel protocol and technique to localize a drone for such applications using a Time Difference of Arrival (TDoA) approach. This further increases the position update rates without sacrificing on accuracy and compare it to traditional methods