 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeployable, Data-Driven Unmanned Vehicle Navigation System in GPS-Denied, Feature-Deficient Environments
Jan 24, 2021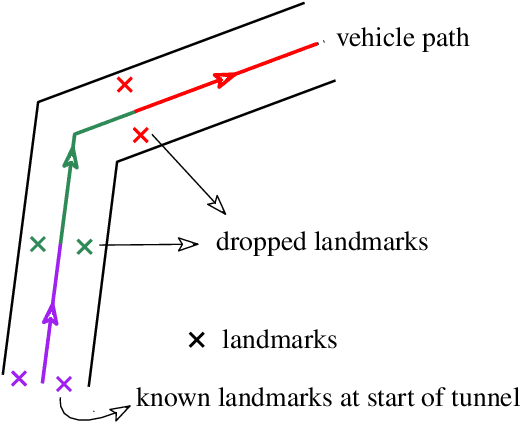
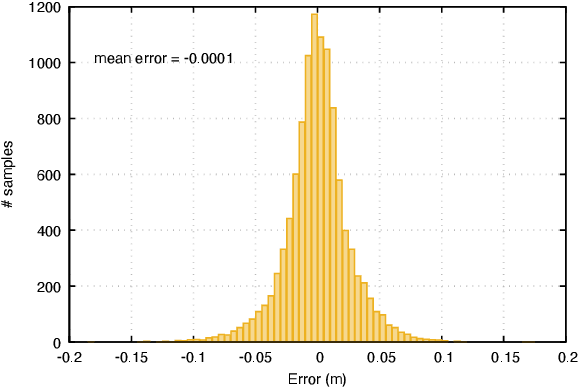
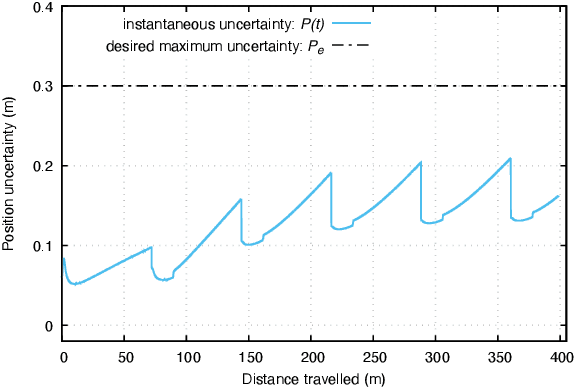
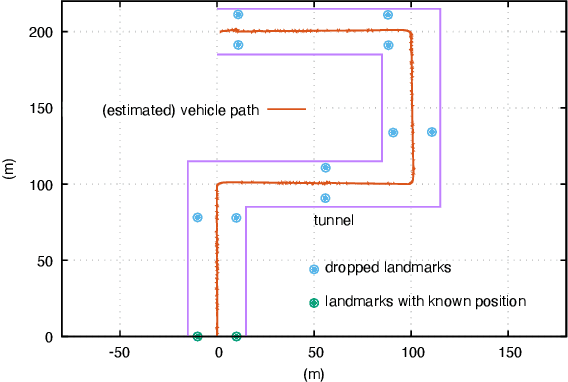
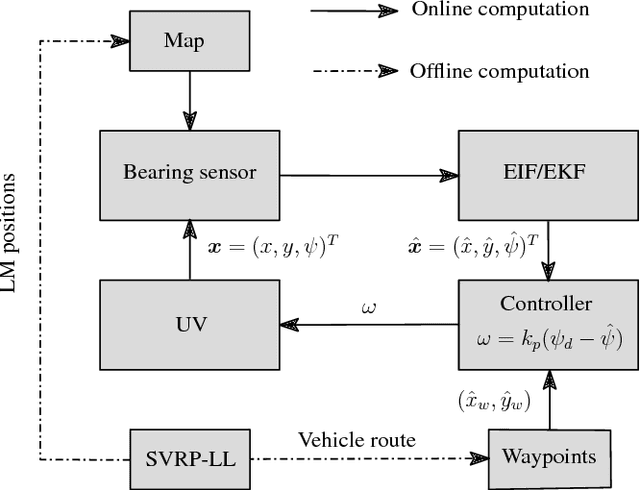
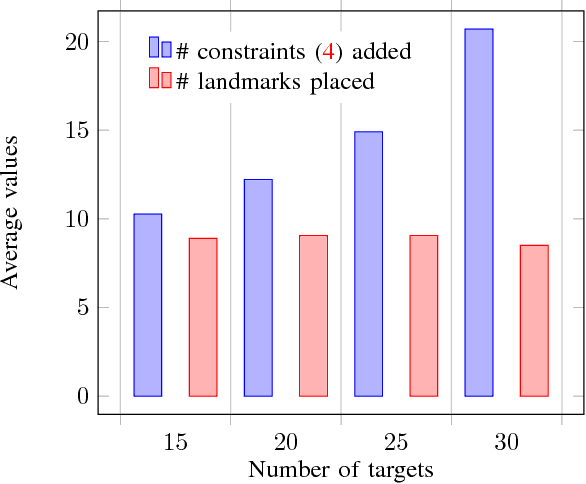
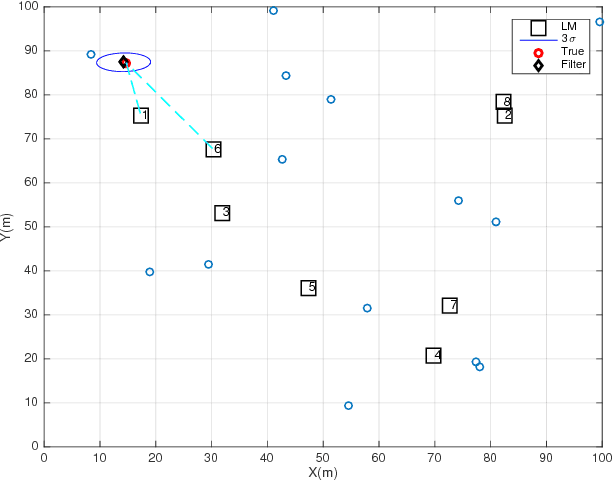
This paper presents a novel data-driven navigation system to navigate an Unmanned Vehicle (UV) in GPS-denied, feature-deficient environments such as tunnels, or mines. The method utilizes Radio Frequency Identification (RFID) tags, also referred to as landmarks, as range sensors that are carried by the vehicle and are deployed in the environment to enable localization as the vehicle traverses its pre-defined path through the tunnel. A key question that arises in such scenario is to estimate and reduce the number of landmarks required for localization before the start of the mission, given some information about the environment. The main constraint of the problem is to keep the maximum uncertainty in the position estimate near a desired value. In this article, we combine techniques from estimation, machine learning, and mixed-integer convex optimization to develop a systematic method to perform localization and navigate the UV through the environment while ensuring minimum number of landmarks are used and all the mission constraints are satisfied.
Routing Unmanned Vehicles in GPS-Denied Environments
Dec 19, 2017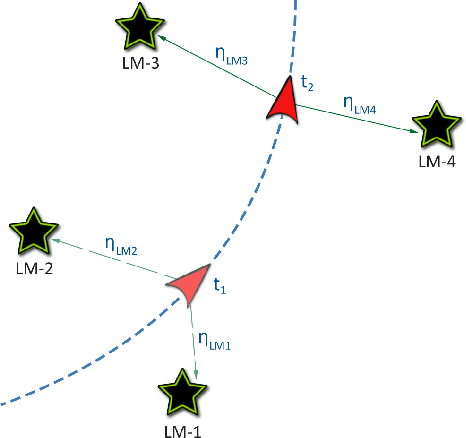
Most of the routing algorithms for unmanned vehicles, that arise in data gathering and monitoring applications in the literature, rely on the Global Positioning System (GPS) information for localization. However, disruption of GPS signals either intentionally or unintentionally could potentially render these algorithms not applicable. In this article, we present a novel method to address this difficulty by combining methods from cooperative localization and routing. In particular, the article formulates a fundamental combinatorial optimization problem to plan routes for an unmanned vehicle in a GPS-restricted environment while enabling localization for the vehicle. We also develop algorithms to compute optimal paths for the vehicle using the proposed formulation. Extensive simulation results are also presented to corroborate the effectiveness and performance of the proposed formulation and algorithms.