 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBio-inspired decision making in swarms under biases from stubborn robots, corrupted communication, and independent discovery
Sep 09, 2025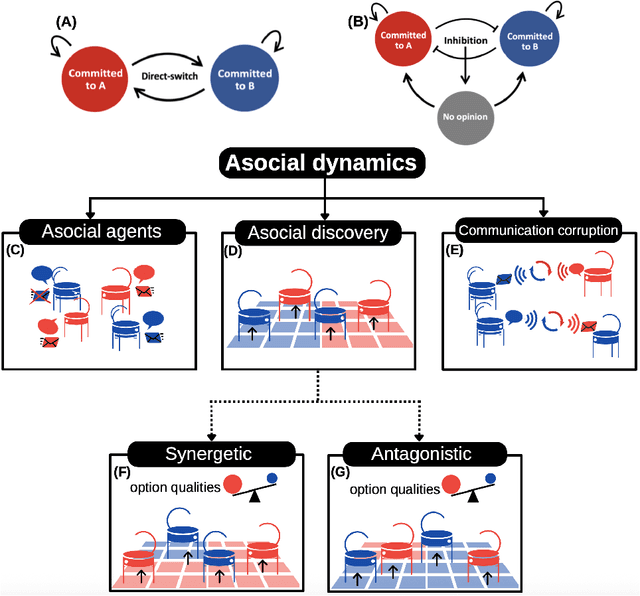
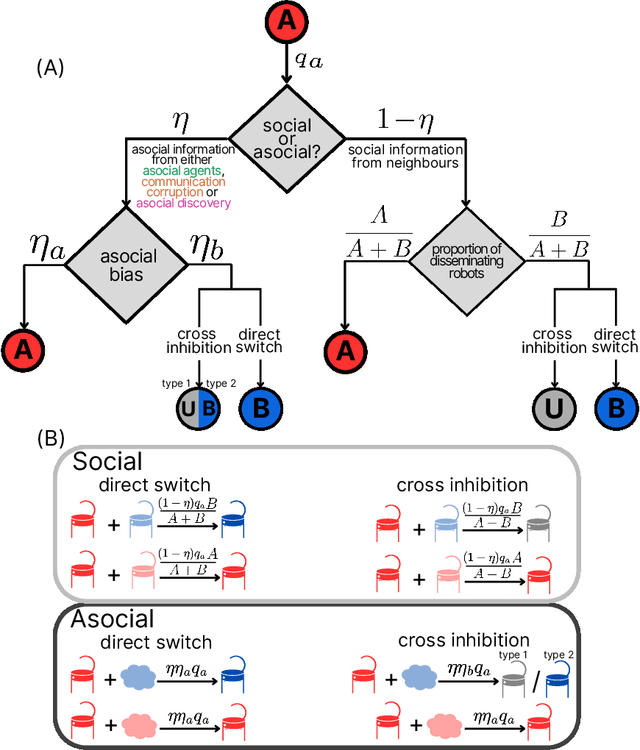
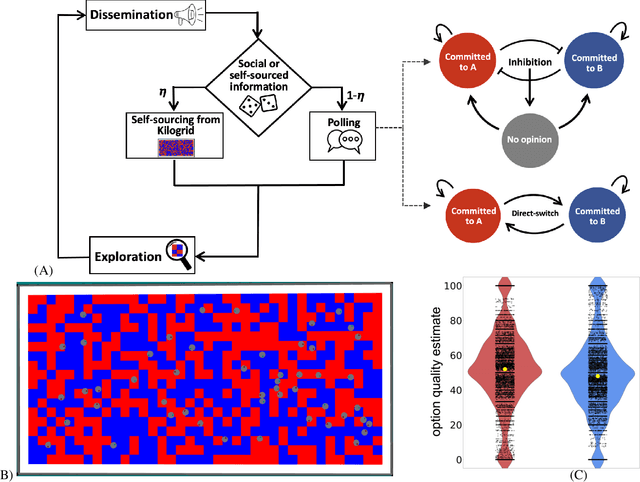
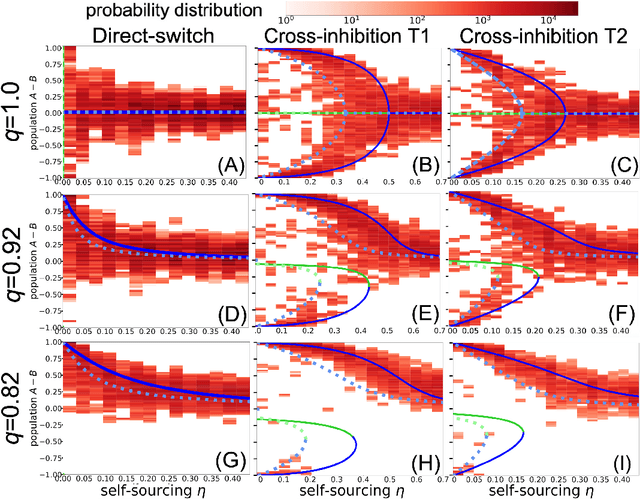
Minimalistic robot swarms offer a scalable, robust, and cost-effective approach to performing complex tasks with the potential to transform applications in healthcare, disaster response, and environmental monitoring. However, coordinating such decentralised systems remains a fundamental challenge, particularly when robots are constrained in communication, computation, and memory. In our study, individual robots frequently make errors when sensing the environment, yet the swarm can rapidly and reliably reach consensus on the best among $n$ discrete options. We compare two canonical mechanisms of opinion dynamics -- direct-switch and cross-inhibition -- which are simple yet effective rules for collective information processing observed in biological systems across scales, from neural populations to insect colonies. We generalise the existing mean-field models by considering asocial biases influencing the opinion dynamics. While swarms using direct-switch reliably select the best option in absence of asocial dynamics, their performance deteriorates once such biases are introduced, often resulting in decision deadlocks. In contrast, bio-inspired cross-inhibition enables faster, more cohesive, accurate, robust, and scalable decisions across a wide range of biased conditions. Our findings provide theoretical and practical insights into the coordination of minimal swarms and offer insights that extend to a broad class of decentralised decision-making systems in biology and engineering.
Toychain: A Simple Blockchain for Research in Swarm Robotics
Jul 09, 2024This technical report describes the implementation of Toychain: a simple, lightweight blockchain implemented in Python, designed for ease of deployment and practicality in robotics research. It can be integrated with various software and simulation tools used in robotics (we have integrated it with ARGoS, Gazebo, and ROS2), and also be deployed on real robots capable of Wi-Fi communications. The Toychain package supports the deployment of smart contracts written in Python (computer programs that can be executed by and synchronized across a distributed network). The nodes in the blockchain can execute smart contract functions by broadcasting transactions, which update the state of the blockchain upon agreement by all other nodes. The conditions for this agreement are established by a consensus protocol. The Toychain package allows for custom implementations of the consensus protocol, which can be useful for research or meeting specific application requirements. Currently, Proof-of-Work and Proof-of-Authority are implemented.