 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgedLITE: Differentiable Lighting-Informed Trajectory Evaluation for On-Orbit Inspection
Dec 17, 2025Visual inspection of space-borne assets is of increasing interest to spacecraft operators looking to plan maintenance, characterise damage, and extend the life of high-value satellites in orbit. The environment of Low Earth Orbit (LEO) presents unique challenges when planning inspection operations that maximise visibility, information, and data quality. Specular reflection of sunlight from spacecraft bodies, self-shadowing, and dynamic lighting in LEO significantly impact the quality of data captured throughout an orbit. This is exacerbated by the relative motion between spacecraft, which introduces variable imaging distances and attitudes during inspection. Planning inspection trajectories with the aide of simulation is a common approach. However, the ability to design and optimise an inspection trajectory specifically to improve the resulting image quality in proximity operations remains largely unexplored. In this work, we present $\partial$LITE, an end-to-end differentiable simulation pipeline for on-orbit inspection operations. We leverage state-of-the-art differentiable rendering tools and a custom orbit propagator to enable end-to-end optimisation of orbital parameters based on visual sensor data. $\partial$LITE enables us to automatically design non-obvious trajectories, vastly improving the quality and usefulness of attained data. To our knowledge, our differentiable inspection-planning pipeline is the first of its kind and provides new insights into modern computational approaches to spacecraft mission planning. Project page: https://appearance-aware.github.io/dlite/
EB-MBD: Emerging-Barrier Model-Based Diffusion for Safe Trajectory Optimization in Highly Constrained Environments
Oct 09, 2025We propose enforcing constraints on Model-Based Diffusion by introducing emerging barrier functions inspired by interior point methods. We show that constraints on Model-Based Diffusion can lead to catastrophic performance degradation, even on simple 2D systems due to sample inefficiency in the Monte Carlo approximation of the score function. We introduce Emerging-Barrier Model-Based Diffusion (EB-MBD) which uses progressively introduced barrier constraints to avoid these problems, significantly improving solution quality, without the need for computationally expensive operations such as projections. We analyze the sampling liveliness of samples each iteration to inform barrier parameter scheduling choice. We demonstrate results for 2D collision avoidance and a 3D underwater manipulator system and show that our method achieves lower cost solutions than Model-Based Diffusion, and requires orders of magnitude less computation time than projection based methods.
Active Vibration Fluidization for Granular Jamming Grippers
Dec 13, 2022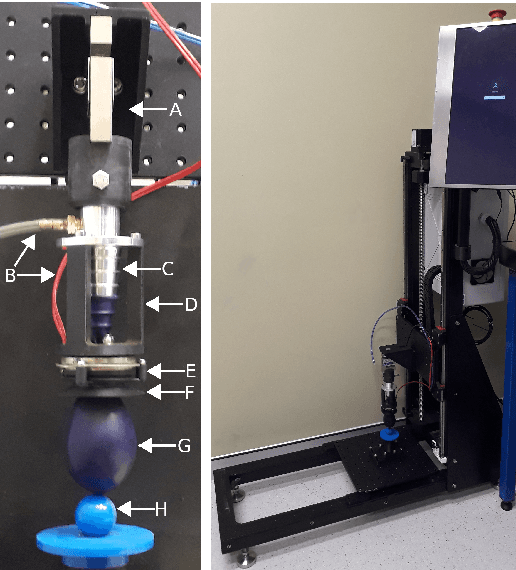
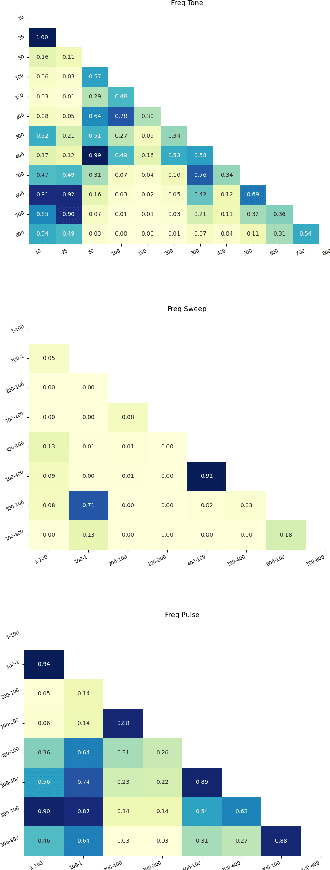
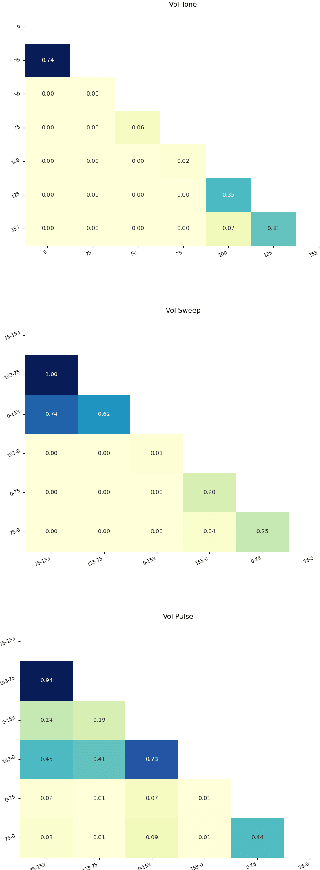
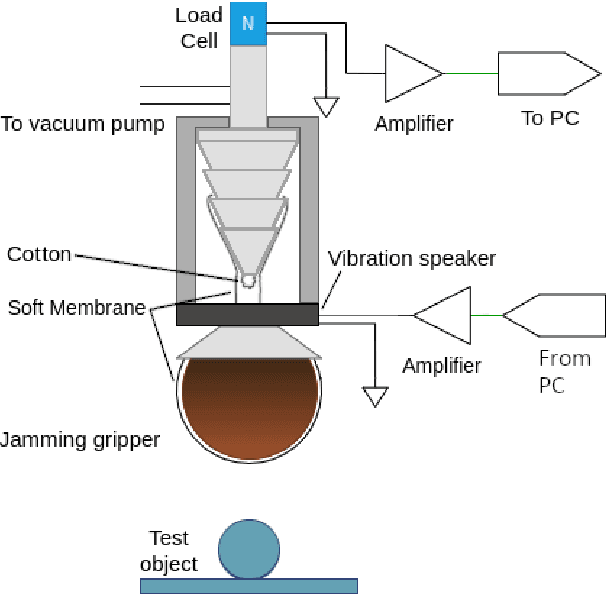
Granular jamming has recently become popular in soft robotics with widespread applications including industrial gripping, surgical robotics and haptics. Previous work has investigated the use of various techniques that exploit the nature of granular physics to improve jamming performance, however this is generally underrepresented in the literature compared to its potential impact. We present the first research that exploits vibration-based fluidisation actively (e.g., during a grip) to elicit bespoke performance from granular jamming grippers. We augment a conventional universal gripper with a computer-controllled audio exciter, which is attached to the gripper via a 3D printed mount, and build an automated test rig to allow large-scale data collection to explore the effects of active vibration. We show that vibration in soft jamming grippers can improve holding strength. In a series of studies, we show that frequency and amplitude of the waveforms are key determinants to performance, and that jamming performance is also dependent on temporal properties of the induced waveform. We hope to encourage further study focused on active vibrational control of jamming in soft robotics to improve performance and increase diversity of potential applications.
Vibration Improves Performance in Granular Jamming Grippers
Sep 22, 2021



Granular jamming is a popular soft robotics technology that has seen recent widespread applications including industrial gripping, surgical robotics and haptics. However, to date the field has not fully exploited the fundamental science of the jamming phase transition, which has been rigorously studied in the field of statistical and condensed matter physics. This work introduces vibration as a means to improve the properties of granular jamming grippers through vibratory fluidisation and the exploitation of resonant modes within the granular material. We show that vibration in soft jamming grippers can improve holding strength, reduce the downwards force needed for the gripping action, and lead to a simplified setup where the second air pump, generally used for unjamming, could be removed. In a series of studies, we show that frequency and amplitude of the waveforms are key determinants to performance, and that jamming performance is also dependent on temporal properties of the induced waveform. We hope to encourage further study in transitioning fundamental jamming mechanisms into a soft robotics context to improve performance and increase diversity of applications for granular jamming grippers.