 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDual Embedding Expansion for Vehicle Re-identification
Apr 18, 2020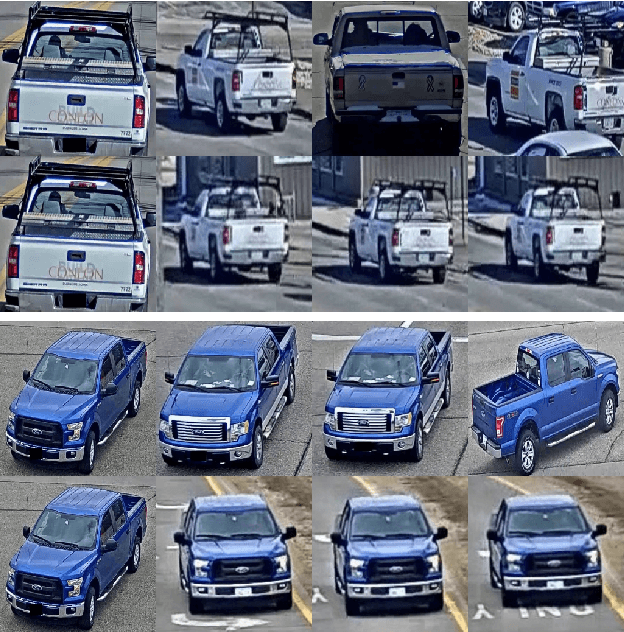
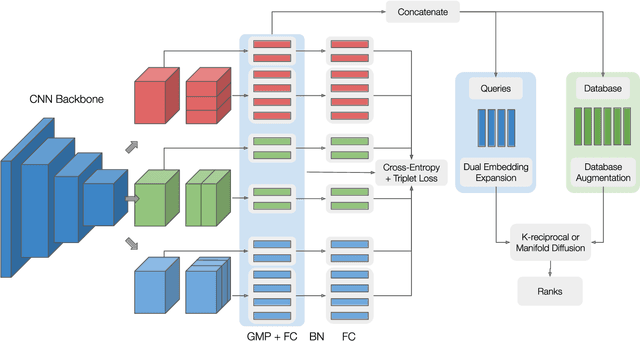
Vehicle re-identification plays a crucial role in the management of transportation infrastructure and traffic flow. However, this is a challenging task due to the large view-point variations in appearance, environmental and instance-related factors. Modern systems deploy CNNs to produce unique representations from the images of each vehicle instance. Most work focuses on leveraging new losses and network architectures to improve the descriptiveness of these representations. In contrast, our work concentrates on re-ranking and embedding expansion techniques. We propose an efficient approach for combining the outputs of multiple models at various scales while exploiting tracklet and neighbor information, called dual embedding expansion (DEx). Additionally, a comparative study of several common image retrieval techniques is presented in the context of vehicle re-ID. Our system yields competitive performance in the 2020 NVIDIA AI City Challenge with promising results. We demonstrate that DEx when combined with other re-ranking techniques, can produce an even larger gain without any additional attribute labels or manual supervision.
Contextual Pyramid Attention Network for Building Segmentation in Aerial Imagery
Apr 15, 2020
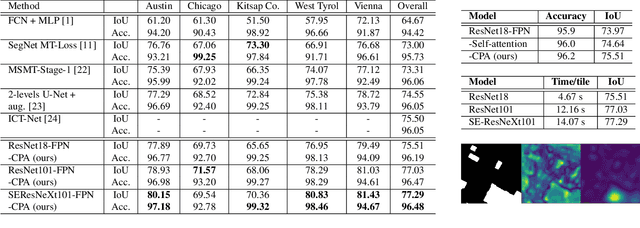
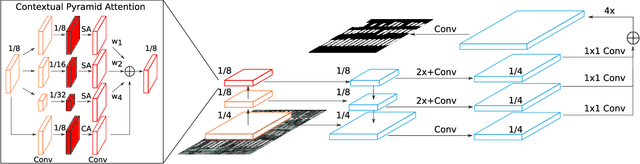
Building extraction from aerial images has several applications in problems such as urban planning, change detection, and disaster management. With the increasing availability of data, Convolutional Neural Networks (CNNs) for semantic segmentation of remote sensing imagery has improved significantly in recent years. However, convolutions operate in local neighborhoods and fail to capture non-local features that are essential in semantic understanding of aerial images. In this work, we propose to improve building segmentation of different sizes by capturing long-range dependencies using contextual pyramid attention (CPA). The pathways process the input at multiple scales efficiently and combine them in a weighted manner, similar to an ensemble model. The proposed method obtains state-of-the-art performance on the Inria Aerial Image Labelling Dataset with minimal computation costs. Our method improves 1.8 points over current state-of-the-art methods and 12.6 points higher than existing baselines on the Intersection over Union (IoU) metric without any post-processing. Code and models will be made publicly available.
Adversarial Loss for Semantic Segmentation of Aerial Imagery
Jan 18, 2020

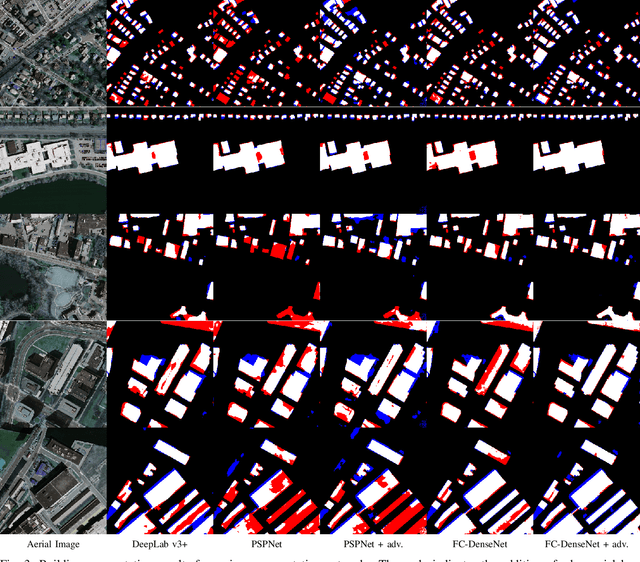
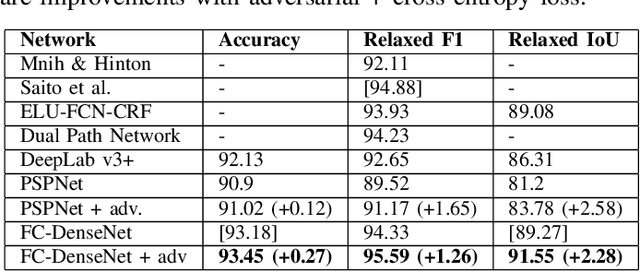
Automatic building extraction from aerial imagery has several applications in urban planning, disaster management, and change detection. In recent years, several works have adopted deep convolutional neural networks (CNNs) for building extraction, since they produce rich features that are invariant against lighting conditions, shadows, etc. Although several advances have been made, building extraction from aerial imagery still presents multiple challenges. Most of the deep learning segmentation methods optimize the per-pixel loss with respect to the ground truth without knowledge of the context. This often leads to imperfect outputs that may lead to missing or unrefined regions. In this work, we propose a novel loss function combining both adversarial and cross-entropy losses that learn to understand both local and global contexts for semantic segmentation. The newly proposed loss function deployed on the DeepLab v3+ network obtains state-of-the-art results on the Massachusetts buildings dataset. The loss function improves the structure and refines the edges of buildings without requiring any of the commonly used post-processing methods, such as Conditional Random Fields. We also perform ablation studies to understand the impact of the adversarial loss. Finally, the proposed method achieves a relaxed F1 score of 95.59% on the Massachusetts buildings dataset compared to the previous best F1 of 94.88%.
Aggregated Deep Local Features for Remote Sensing Image Retrieval
Mar 22, 2019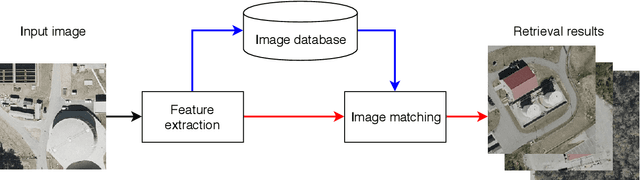

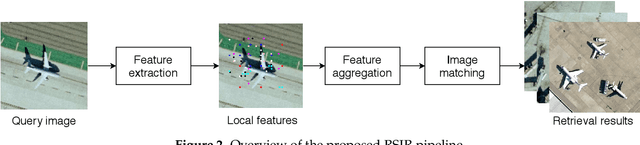
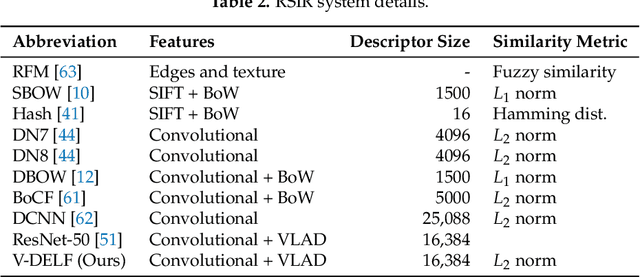
Remote Sensing Image Retrieval remains a challenging topic due to the special nature of Remote Sensing Imagery. Such images contain various different semantic objects, which clearly complicates the retrieval task. In this paper, we present an image retrieval pipeline that uses attentive, local convolutional features and aggregates them using the Vector of Locally Aggregated Descriptors (VLAD) to produce a global descriptor. We study various system parameters such as the multiplicative and additive attention mechanisms and descriptor dimensionality. We propose a query expansion method that requires no external inputs. Experiments demonstrate that even without training, the local convolutional features and global representation outperform other systems. After system tuning, we can achieve state-of-the-art or competitive results. Furthermore, we observe that our query expansion method increases overall system performance by about 3%, using only the top-three retrieved images. Finally, we show how dimensionality reduction produces compact descriptors with increased retrieval performance and fast retrieval computation times, e.g. 50% faster than the current systems.
* Published in Remote Sensing. The first two authors have equal contribution
Towards Accurate Camera Geopositioning by Image Matching
Mar 13, 2019In this work, we present a camera geopositioning system based on matching a query image against a database with panoramic images. For matching, our system uses memory vectors aggregated from global image descriptors based on convolutional features to facilitate fast searching in the database. To speed up searching, a clustering algorithm is used to balance geographical positioning and computation time. We refine the obtained position from the query image using a new outlier removal algorithm. The matching of the query image is obtained with a recall@5 larger than 90% for panorama-to-panorama matching. We cluster available panoramas from geographically adjacent locations into a single compact representation and observe computational gains of approximately 50% at the cost of only a small (approximately 3%) recall loss. Finally, we present a coordinate estimation algorithm that reduces the median geopositioning error by up to 20%.