 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReimagining partial thickness keratoplasty: An eye mountable robot for autonomous big bubble needle insertion
Oct 18, 2024Autonomous surgical robots have demonstrated significant potential to standardize surgical outcomes, driving innovations that enhance safety and consistency regardless of individual surgeon experience. Deep anterior lamellar keratoplasty (DALK), a partial thickness corneal transplant surgery aimed at replacing the anterior part of cornea above Descemet membrane (DM), would greatly benefit from an autonomous surgical approach as it highly relies on surgeon skill with high perforation rates. In this study, we proposed a novel autonomous surgical robotic system (AUTO-DALK) based on a customized neural network capable of precise needle control and consistent big bubble demarcation on cadaver and live rabbit models. We demonstrate the feasibility of an AI-based image-guided vertical drilling approach for big bubble generation, in contrast to the conventional horizontal needle approach. Our system integrates an optical coherence tomography (OCT) fiber optic distal sensor into the eye-mountable micro robotic system, which automatically segments OCT M-mode depth signals to identify corneal layers using a custom deep learning algorithm. It enables the robot to autonomously guide the needle to targeted tissue layers via a depth-controlled feedback loop. We compared autonomous needle insertion performance and resulting pneumo-dissection using AUTO-DALK against 1) freehand insertion, 2) OCT sensor guided manual insertion, and 3) teleoperated robotic insertion, reporting significant improvements in insertion depth, pneumo-dissection depth, task completion time, and big bubble formation. Ex vivo and in vivo results indicate that the AI-driven, AUTO-DALK system, is a promising solution to standardize pneumo-dissection outcomes for partial thickness keratoplasty.
SNGuess: A method for the selection of young extragalactic transients
Aug 13, 2022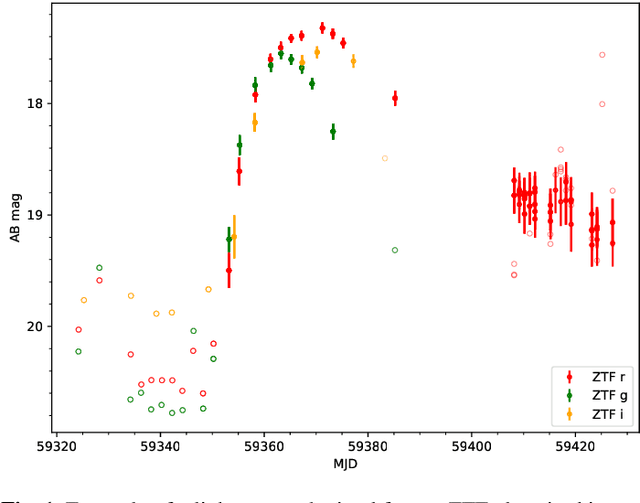
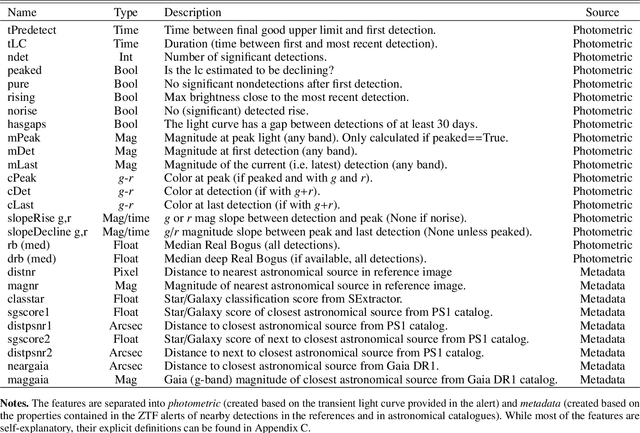
With a rapidly rising number of transients detected in astronomy, classification methods based on machine learning are increasingly being employed. Their goals are typically to obtain a definitive classification of transients, and for good performance they usually require the presence of a large set of observations. However, well-designed, targeted models can reach their classification goals with fewer computing resources. This paper presents SNGuess, a model designed to find young extragalactic nearby transients with high purity. SNGuess works with a set of features that can be efficiently calculated from astronomical alert data. Some of these features are static and associated with the alert metadata, while others must be calculated from the photometric observations contained in the alert. Most of the features are simple enough to be obtained or to be calculated already at the early stages in the lifetime of a transient after its detection. We calculate these features for a set of labeled public alert data obtained over a time span of 15 months from the Zwicky Transient Facility (ZTF). The core model of SNGuess consists of an ensemble of decision trees, which are trained via gradient boosting. Approximately 88% of the candidates suggested by SNGuess from a set of alerts from ZTF spanning from April 2020 to August 2021 were found to be true relevant supernovae (SNe). For alerts with bright detections, this number ranges between 92% and 98%. Since April 2020, transients identified by SNGuess as potential young SNe in the ZTF alert stream are being published to the Transient Name Server (TNS) under the AMPEL_ZTF_NEW group identifier. SNGuess scores for any transient observed by ZTF can be accessed via a web service. The source code of SNGuess is publicly available.