 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLink-Intensive Alignment for Incomplete Knowledge Graphs
Dec 17, 2021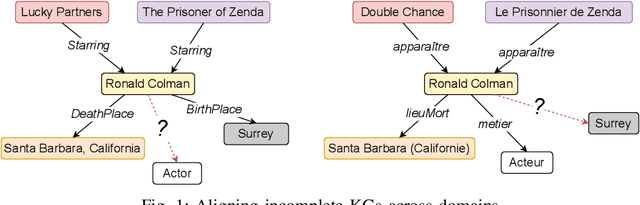
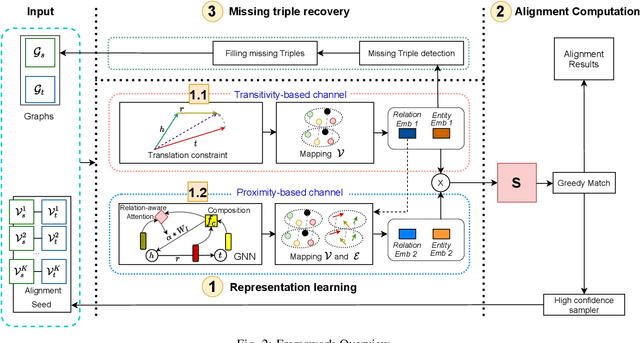
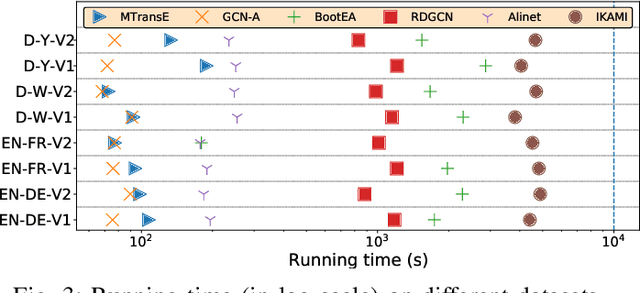
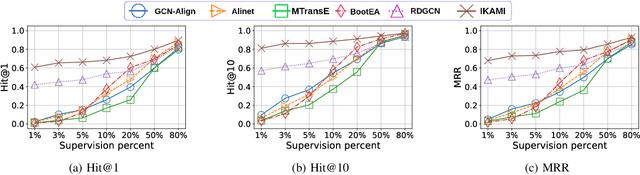
Knowledge graph (KG) alignment - the task of recognizing entities referring to the same thing in different KGs - is recognized as one of the most important operations in the field of KG construction and completion. However, existing alignment techniques often assume that the input KGs are complete and isomorphic, which is not true due to the real-world heterogeneity in the domain, size, and sparsity. In this work, we address the problem of aligning incomplete KGs with representation learning. Our KG embedding framework exploits two feature channels: transitivity-based and proximity-based. The former captures the consistency constraints between entities via translation paths, while the latter captures the neighbourhood structure of KGs via attention guided relation-aware graph neural network. The two feature channels are jointly learned to exchange important features between the input KGs while enforcing the output representations of the input KGs in the same embedding space. Also, we develop a missing links detector that discovers and recovers the missing links in the input KGs during the training process, which helps mitigate the incompleteness issue and thus improve the compatibility of the learned representations. The embeddings then are fused to generate the alignment result, and the high-confidence matched node pairs are updated to the pre-aligned supervision data to improve the embeddings gradually. Empirical results show that our model is up to 15.2\% more accurate than the SOTA and is robust against different levels of incompleteness. We also demonstrate that the knowledge exchanging between the KGs helps reveal the unseen facts from knowledge graphs (a.k.a. knowledge completion), with the result being 3.5\% higher than the SOTA knowledge graph completion techniques.