 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLATMOS: Latent Automaton Task Model from Observation Sequences
Mar 11, 2025



Robot task planning from high-level instructions is an important step towards deploying fully autonomous robot systems in the service sector. Three key aspects of robot task planning present challenges yet to be resolved simultaneously, namely, (i) factorization of complex tasks specifications into simpler executable subtasks, (ii) understanding of the current task state from raw observations, and (iii) planning and verification of task executions. To address these challenges, we propose LATMOS, an automata-inspired task model that, given observations from correct task executions, is able to factorize the task, while supporting verification and planning operations. LATMOS combines an observation encoder to extract the features from potentially high-dimensional observations with automata theory to learn a sequential model that encapsulates an automaton with symbols in the latent feature space. We conduct extensive evaluations in three task model learning setups: (i) abstract tasks described by logical formulas, (ii) real-world human tasks described by videos and natural language prompts and (iii) a robot task described by image and state observations. The results demonstrate the improved plan generation and verification capabilities of LATMOS across observation modalities and tasks.
LTLCodeGen: Code Generation of Syntactically Correct Temporal Logic for Robot Task Planning
Mar 10, 2025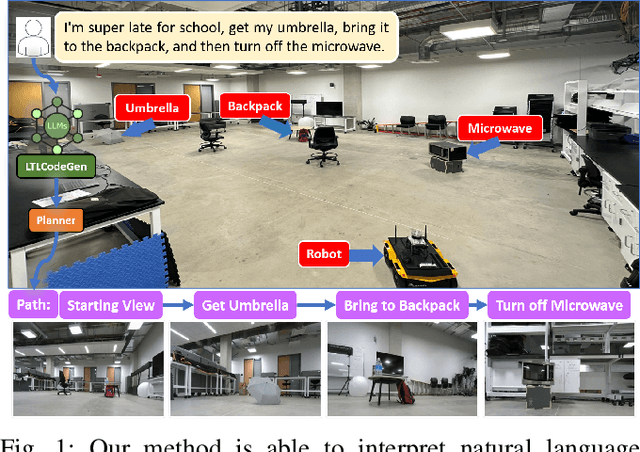
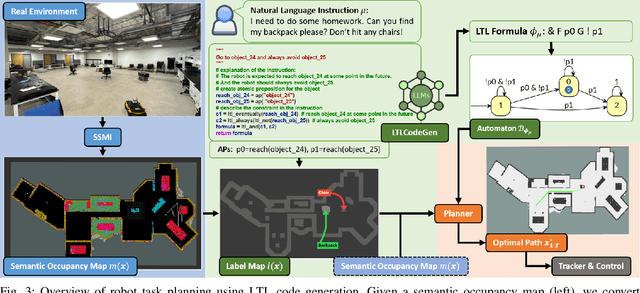
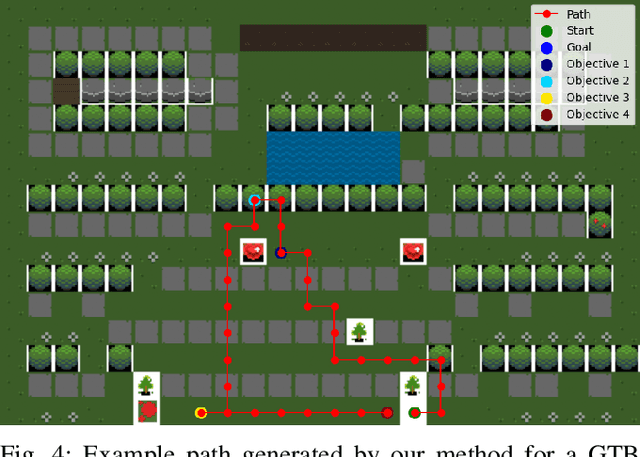
This paper focuses on planning robot navigation tasks from natural language specifications. We develop a modular approach, where a large language model (LLM) translates the natural language instructions into a linear temporal logic (LTL) formula with propositions defined by object classes in a semantic occupancy map. The LTL formula and the semantic occupancy map are provided to a motion planning algorithm to generate a collision-free robot path that satisfies the natural language instructions. Our main contribution is LTLCodeGen, a method to translate natural language to syntactically correct LTL using code generation. We demonstrate the complete task planning method in real-world experiments involving human speech to provide navigation instructions to a mobile robot. We also thoroughly evaluate our approach in simulated and real-world experiments in comparison to end-to-end LLM task planning and state-of-the-art LLM-to-LTL translation methods.