 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLTLCodeGen: Code Generation of Syntactically Correct Temporal Logic for Robot Task Planning
Mar 10, 2025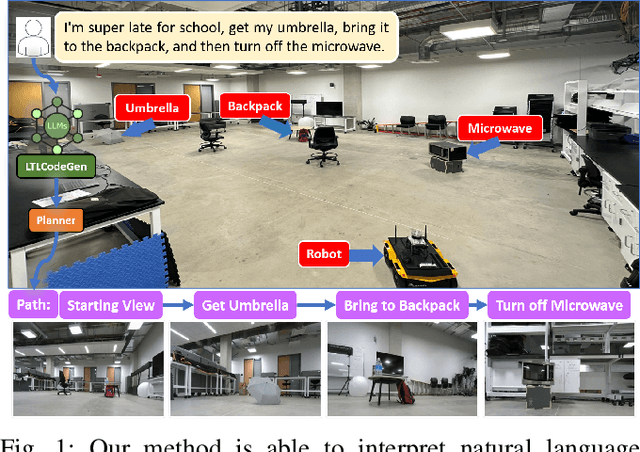
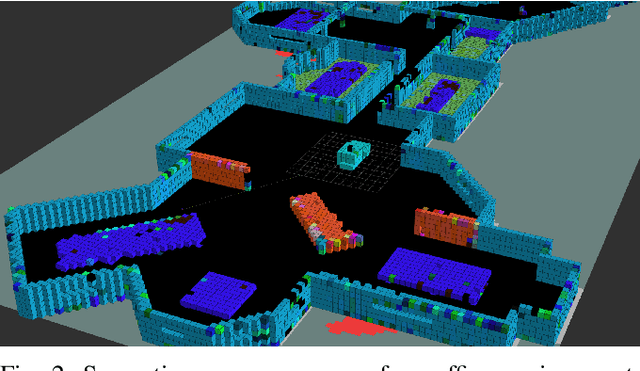
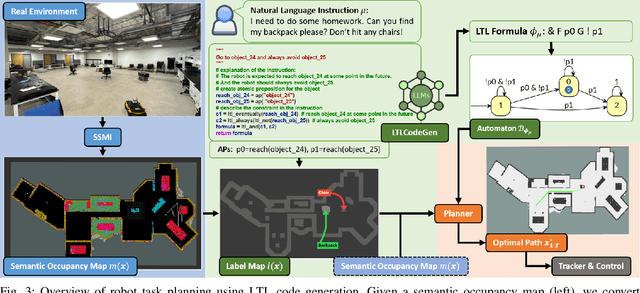
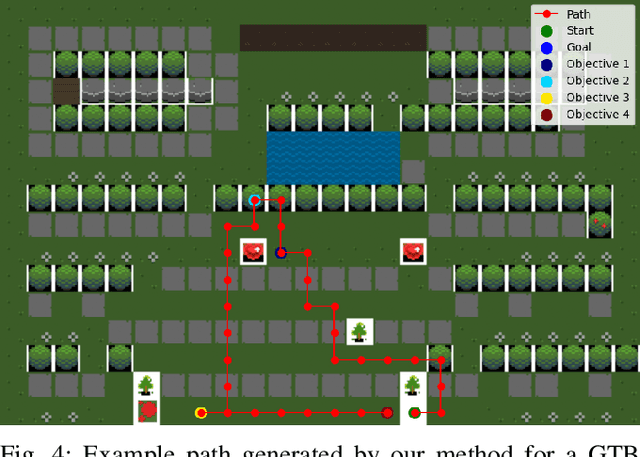
This paper focuses on planning robot navigation tasks from natural language specifications. We develop a modular approach, where a large language model (LLM) translates the natural language instructions into a linear temporal logic (LTL) formula with propositions defined by object classes in a semantic occupancy map. The LTL formula and the semantic occupancy map are provided to a motion planning algorithm to generate a collision-free robot path that satisfies the natural language instructions. Our main contribution is LTLCodeGen, a method to translate natural language to syntactically correct LTL using code generation. We demonstrate the complete task planning method in real-world experiments involving human speech to provide navigation instructions to a mobile robot. We also thoroughly evaluate our approach in simulated and real-world experiments in comparison to end-to-end LLM task planning and state-of-the-art LLM-to-LTL translation methods.