 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolymander II: an amphibious salamander-inspired robot with contact and flow sensors
May 26, 2026Robots benefit from sensory information to coordinate body movement, gain robustness against perturbations, and transition between different modes to adapt to various terrains. However, few amphibious robots can sense interactions with both terrestrial and aquatic environments. In this paper, we present a solution that uses Hall-effect sensors to sense foot contact forces and lateral hydrodynamic forces on a salamander-inspired amphibious robot. With two bus lines, the robot can simultaneously acquire this exteroceptive information at more than 500 Hz and proprioceptive information, such as joint positions and loads, at 100 Hz. The Hall-effect sensors used are compact, making them suitable for embedding in multiple positions within a robot, and exhibit high sensitivity to small forces. Moreover, because the sensor can be positioned separately from the measured object, waterproofing can be implemented with relative ease. Our tests demonstrate the robot's capabilities in traversing amphibious environments and its potential in using feedback control for more complex locomotion tasks.
Learning Whole-Body Control for a Salamander Robot
Mar 17, 2026Amphibious legged robots inspired by salamanders are promising in applications in complex amphibious environments. However, despite the significant success of training controllers that achieve diverse locomotion behaviors in conventional quadrupedal robots, most salamander robots relied on central-pattern-generator (CPG)-based and model-based coordination strategies for locomotion control. Learning unified joint-level whole-body control that reliably transfers from simulation to highly articulated physical salamander robots remains relatively underexplored. In addition, few legged robots have tried learning-based controllers in amphibious environments. In this work, we employ Reinforcement Learning to map proprioceptive observations and commanded velocities to joint-level actions, allowing coordinated locomotor behaviors to emerge. To deploy these policies on hardware, we adopt a system-level real-to-sim matching and sim-to-real transfer strategy. The learned controller achieves stable and coordinated walking on both flat and uneven terrains in the real world. Beyond terrestrial locomotion, the framework enables transitions between walking and swimming in simulation, highlighting a phenomenon of interest for understanding locomotion across distinct physical modes.
Snake and Snake Robot Locomotion in Complex, 3-D Terrain
Feb 22, 2023Snakes can traverse almost all types of environments by bending their elongate bodies in 3-D to interact with the terrain. Similarly, a snake robot is a promising platform to perform critical tasks in various environments. Understanding how 3-D body bending effectively interacts with the terrain for propulsion and stability can not only inform how snakes traverse natural environments, but also allow snake robots to achieve similar performance. How snakes and snake robots move on flat surfaces has been understood well. However, such ideal terrain is rare in natural environments and little was understood about how to generate propulsion and maintain stability in 3-D terrain, except for some studies on arboreal snake locomotion and on robots using geometric planning. To bridge the knowledge gap, we integrated animal experiments and robotic studies in three representative environments: a large smooth step, an uneven arena of blocks of large height variation, and large bumps. We discovered that vertical body bending induces stability challenges but can generate large propulsion. When traversing a large smooth step, a snake robot is challenged by roll instability that increases with the amplitude of vertical bending. The instability can be reduced by body compliance that statistically improves body-terrain contact. Despite this, vertical body bending can potentially allow snakes to push against terrain for propulsion, as demonstrated by corn snakes traversing an uneven arena. A snake robot can generate large propulsion like this if contact is well maintained. Contact feedback control can help accommodate perturbations such as novel terrain geometry or excessive external forces by improving contact. Our findings provide insights into how snakes and snake robots can use vertical body bending for efficient and versatile traversal of the 3-D world stably.
SenSnake: A snake robot with contact force sensing for studying locomotion in complex 3-D terrain
Dec 15, 2021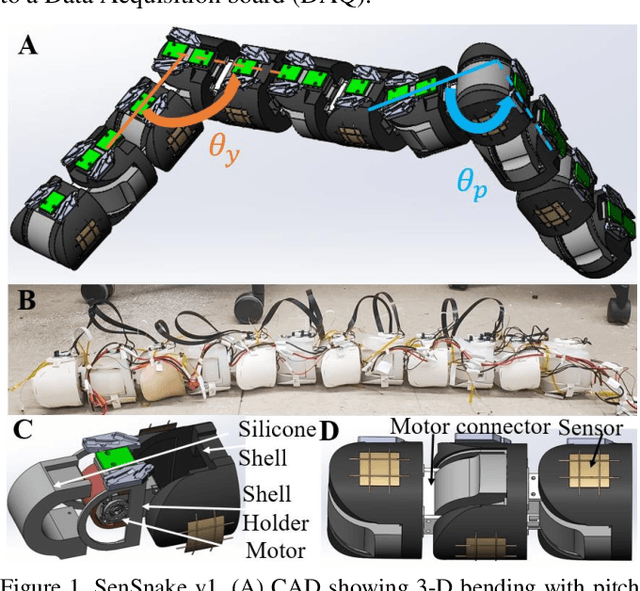
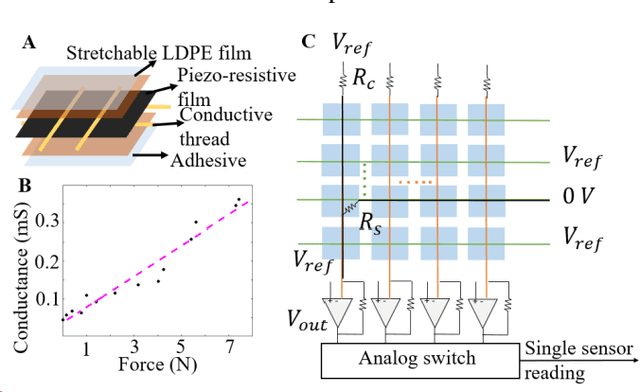
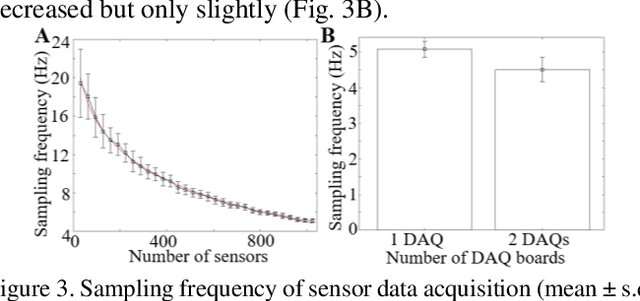
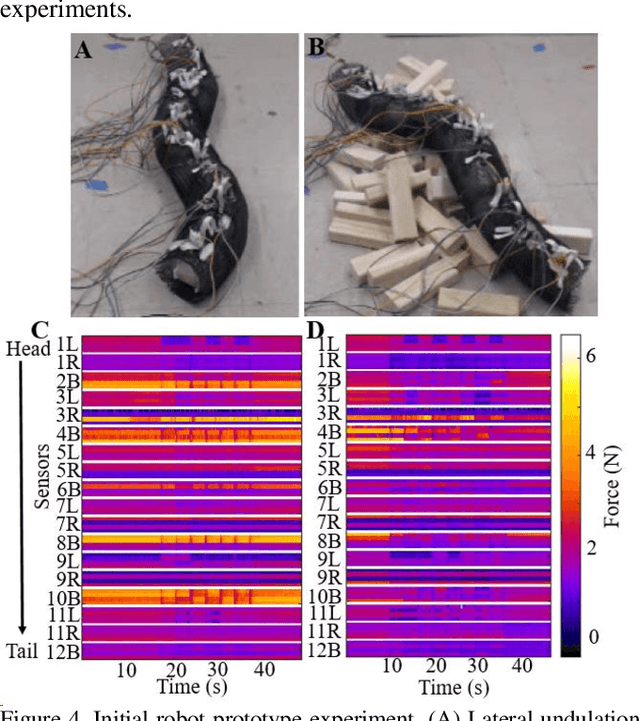
Despite advances in a diversity of environments, snake robots are still far behind snakes in traversing complex 3-D terrain with large obstacles. This is due to a lack of understanding of how to control 3-D body bending to push against terrain features to generate and control propulsion. Biological studies suggested that generalist snakes use contact force sensing to adjust body bending in real time to do so. However, studying this sensory-modulated force control in snakes is challenging, due to a lack of basic knowledge of how their force sensing organs work. Here, we take a robophysics approach to make progress, starting by developing a snake robot capable of 3-D body bending with contact force sensing to enable systematic locomotion experiments and force measurements. Through two development and testing iterations, we created a 12-segment robot with 36 piezo-resistive sheet sensors distributed on all segments with compliant shells with a sampling frequency of 30 Hz. The robot measured contact forces while traversing a large obstacle using vertical bending with high repeatability, achieving the goal of providing a platform for systematic experiments. Finally, we explored model-based calibration considering the viscoelastic behavior of the piezo-resistive sensor, which will for useful for future studies.