 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinuous-Time Spatiotemporal Calibration of a Rolling Shutter Camera---IMU System
Aug 16, 2021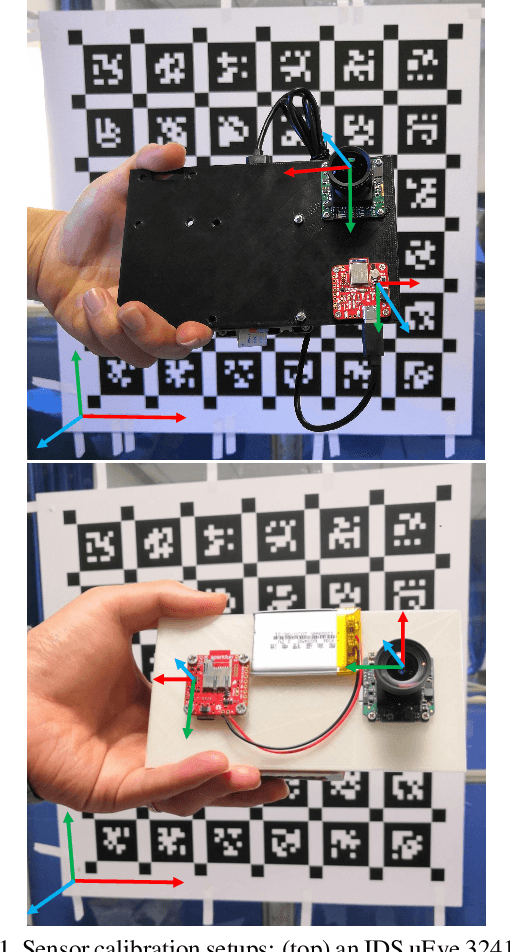
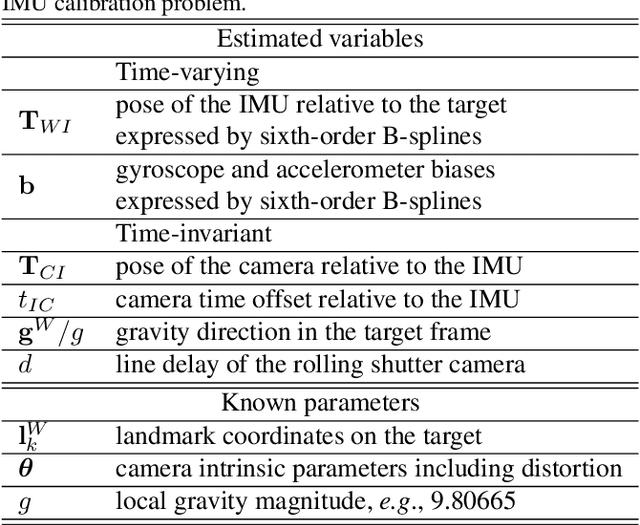
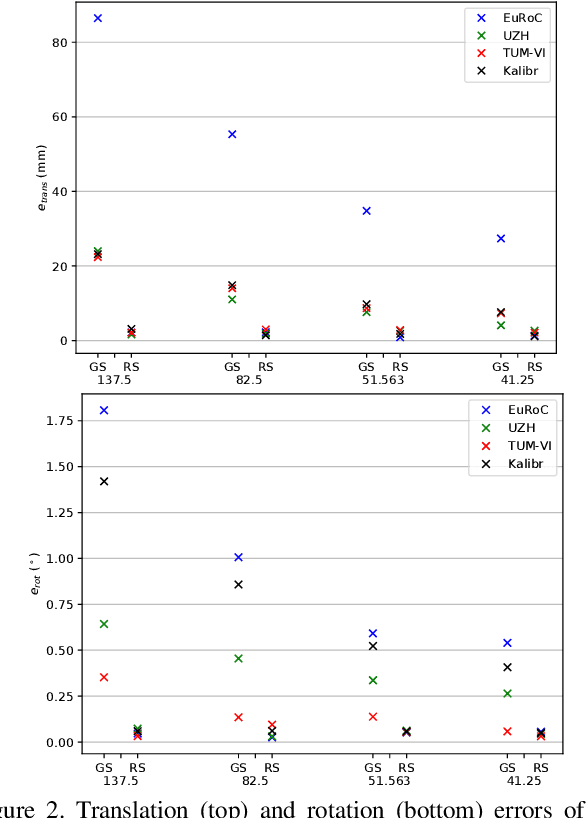
The rolling shutter (RS) mechanism is widely used by consumer-grade cameras, which are essential parts in smartphones and autonomous vehicles. The RS effect leads to image distortion upon relative motion between a camera and the scene. This effect needs to be considered in video stabilization, structure from motion, and vision-aided odometry, for which recent studies have improved earlier global shutter (GS) methods by accounting for the RS effect. However, it is still unclear how the RS affects spatiotemporal calibration of the camera in a sensor assembly, which is crucial to good performance in aforementioned applications. This work takes the camera-IMU system as an example and looks into the RS effect on its spatiotemporal calibration. To this end, we develop a calibration method for a RS-camera-IMU system with continuous-time B-splines by using a calibration target. Unlike in calibrating GS cameras, every observation of a landmark on the target has a unique camera pose fitted by continuous-time B-splines. With simulated data generated from four sets of public calibration data, we show that RS can noticeably affect the extrinsic parameters, causing errors about 1$^\circ$ in orientation and 2 $cm$ in translation with a RS setting as in common smartphone cameras. With real data collected by two industrial camera-IMU systems, we find that considering the RS effect gives more accurate and consistent spatiotemporal calibration. Moreover, our method also accurately calibrates the inter-line delay of the RS. The code for simulation and calibration is publicly available.