 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredicting Geographic Information with Neural Cellular Automata
Sep 20, 2020

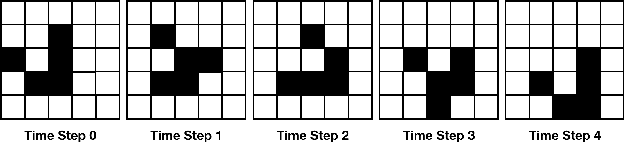

This paper presents a novel framework using neural cellular automata (NCA) to regenerate and predict geographic information. The model extends the idea of using NCA to generate/regenerate a specific image by training the model with various geographic data, and thus, taking the traffic condition map as an example, the model is able to predict traffic conditions by giving certain induction information. Our research verified the analogy between NCA and gene in biology, while the innovation of the model significantly widens the boundary of possible applications based on NCAs. From our experimental results, the model shows great potentials in its usability and versatility which are not available in previous studies. The code for model implementation is available at https://redacted.
Dynamic Partial Removal: A Neural Network Heuristic for Large Neighborhood Search
May 19, 2020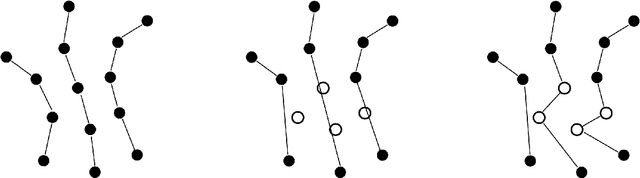

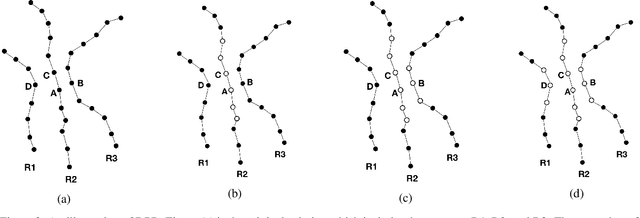

This paper presents a novel neural network design that learns the heuristic for Large Neighborhood Search (LNS). LNS consists of a destroy operator and a repair operator that specify a way to carry out the neighborhood search to solve the Combinatorial Optimization problems. The proposed approach in this paper applies a Hierarchical Recurrent Graph Convolutional Network (HRGCN) as a LNS heuristic, namely Dynamic Partial Removal, with the advantage of adaptive destruction and the potential to search across a large scale, as well as the context-awareness in both spatial and temporal perspective. This model is generalized as an efficient heuristic approach to different combinatorial optimization problems, especially to the problems with relatively tight constraints. We apply this model to vehicle routing problem (VRP) in this paper as an example. The experimental results show that this approach outperforms the traditional LNS heuristics on the same problem as well. The source code is available at \href{https://github.com/water-mirror/DPR}{https://github.com/water-mirror/DPR}.
Learn to Design the Heuristics for Vehicle Routing Problem
Feb 20, 2020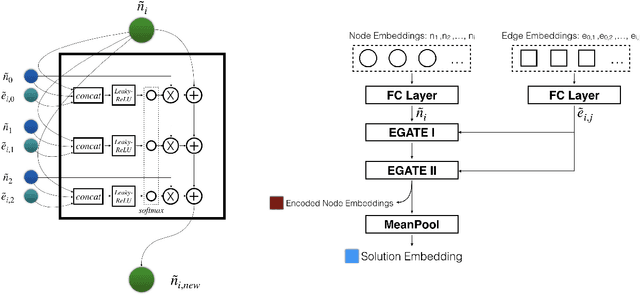
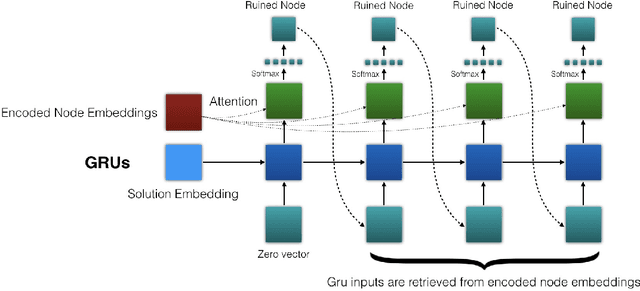


This paper presents an approach to learn the local-search heuristics that iteratively improves the solution of Vehicle Routing Problem (VRP). A local-search heuristics is composed of a destroy operator that destructs a candidate solution, and a following repair operator that rebuilds the destructed one into a new one. The proposed neural network, as trained through actor-critic framework, consists of an encoder in form of a modified version of Graph Attention Network where node embeddings and edge embeddings are integrated, and a GRU-based decoder rendering a pair of destroy and repair operators. Experiment results show that it outperforms both the traditional heuristics algorithms and the existing neural combinatorial optimization for VRP on medium-scale data set, and is able to tackle the large-scale data set (e.g., over 400 nodes) which is a considerable challenge in this area. Moreover, the need for expertise and handcrafted heuristics design is eliminated due to the fact that the proposed network learns to design the heuristics with a better performance. Our implementation is available online.