 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety Challenges for Autonomous Vehicles in the Absence of Connectivity
Jun 06, 2020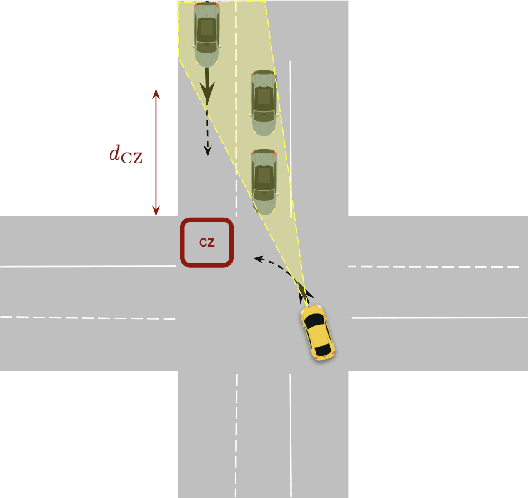

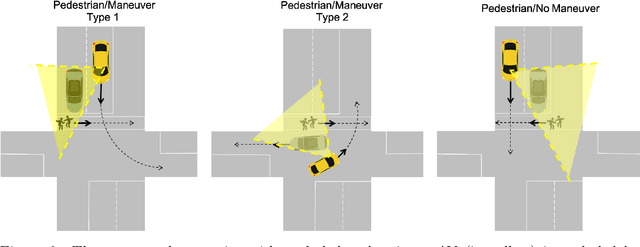
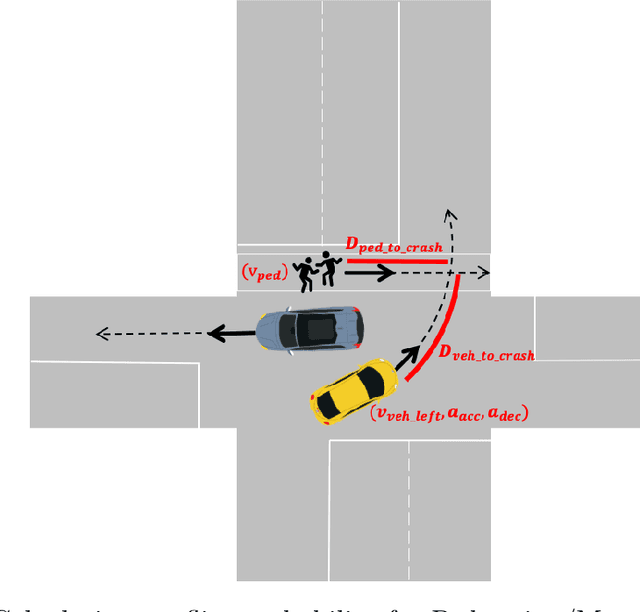
Autonomous vehicles (AVs) are promoted as a technology that will create a future with effortless driving and virtually no traffic accidents. AV companies claim that, when fully developed, the technology will eliminate 94\% of all accidents that are caused by human error. These AVs will likely avoid the large number of crashes caused by impaired, distracted or reckless drivers. But there remains a significant proportion of crashes for which no driver is directly responsible. In particular, the absence of connectivity of an AV with its neighboring vehicles (V2V) and the infrastructure (I2V) leads to a lack of information that can induce such crashes. Since AV designs today do not require such connectivity, these crashes would persist in the future. Using prototypical examples motivated by the NHTSA pre-crash scenario typology, we show that fully autonomous vehicles cannot guarantee safety in the absence of connectivity. Combining theoretical models and empirical data, we also argue that such hazardous scenarios will occur with a significantly high probability. This suggests that incorporating connectivity is an essential step on the path towards safe AV technology.
A Queuing Approach to Parking: Modeling, Verification, and Prediction
Aug 29, 2019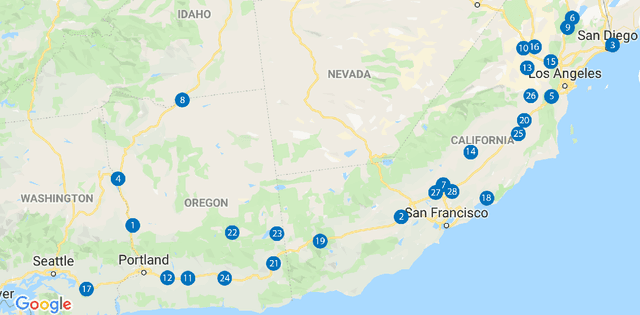
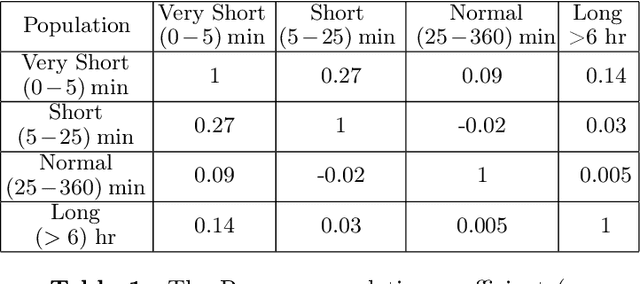
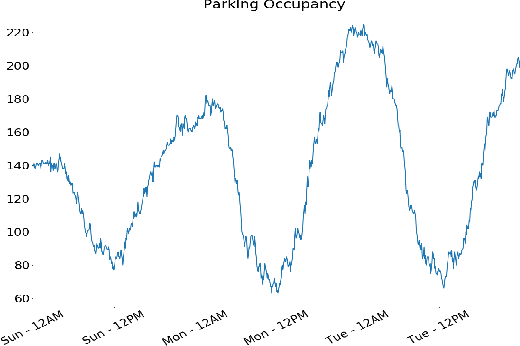
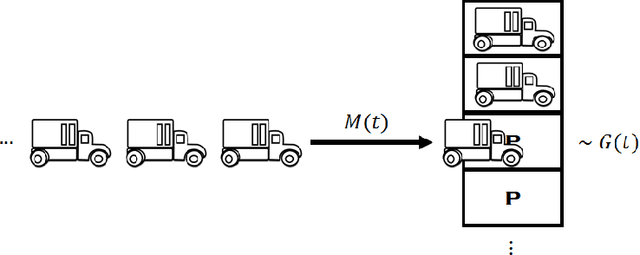
We present a queuing model of parking dynamics and a model-based prediction method to provide real-time probabilistic forecasts of future parking occupancy. The queuing model has a non-homogeneous arrival rate and time-varying service time distribution. All statistical assumptions of the model are verified using data from 29 truck parking locations, each with between 55 and 299 parking spots. For each location and each spot the data specifies the arrival and departure times of a truck, for 16 months of operation. The modeling framework presented in this paper provides empirical support for queuing models adopted in many theoretical studies and policy designs. We discuss how our framework can be used to study parking problems in different environments. Based on the queuing model, we propose two prediction methods, a microscopic method and a macroscopic method, that provide a real-time probabilistic forecast of parking occupancy for an arbitrary forecast horizon. These model-based methods convert a probabilistic forecast problem into a parameter estimation problem that can be tackled using classical estimation methods such as regressions or pure machine learning algorithms. We characterize a lower bound for an arbitrary real-time prediction algorithm. We evaluate the performance of these methods using the truck data comparing the outcomes of their implementations with other model-based and model-free methods proposed in the literature.
Making intersections safer with I2V communication
Jan 19, 2019
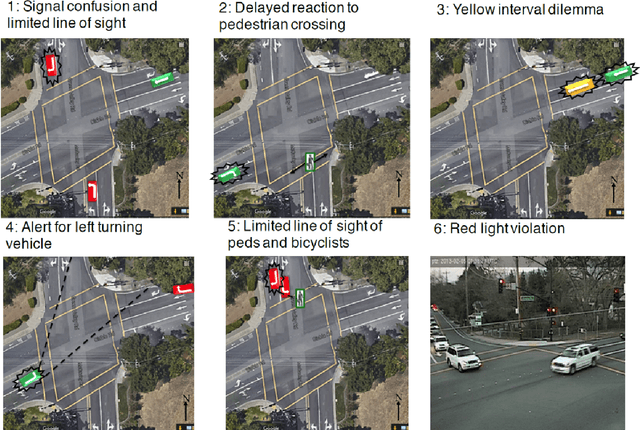
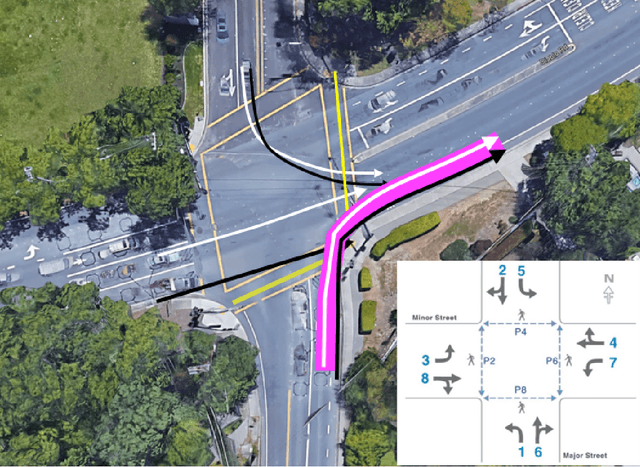
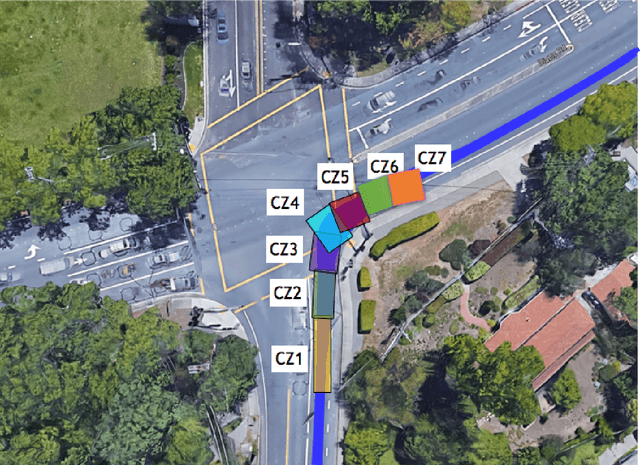
Intersections are hazardous places. Threats arise from interactions among pedestrians, bicycles and vehicles, more complicated vehicle trajectories in the absence of lane markings, phases that prevent determining who has the right of way, invisible vehicle approaches, vehicle obstructions, and illegal movements. These challenges are not fully addressed by the "road diet" and road redesign prescribed in Vision Zero plans, nor will they be completely overcome by autonomous vehicles with their many sensors and tireless attention to surroundings. Accidents can also occur because drivers, cyclists and pedestrians do not have the information they need to avoid wrong decisions. In these cases, the missing information can be computed and broadcast by an intelligent intersection. The information gives the current full signal phase, an estimate of the time when the phase will change, and the occupancy of the blind spots of the driver or autonomous vehicle. The paper develops a design of the intelligent intersection, motivated by the analysis of an accident at an intersection in Tempe, AZ, between an automated Uber Volvo and a manual Honda CRV and culminates in a proposal for an intelligent intersection infrastructure. The intelligent intersection also serves as a software-enabled version of the `protected intersection' design to improve the passage of cyclists and pedestrians through an intersection.
Low-dimensional Models in Spatio-Temporal Wind Speed Forecasting
Mar 04, 2015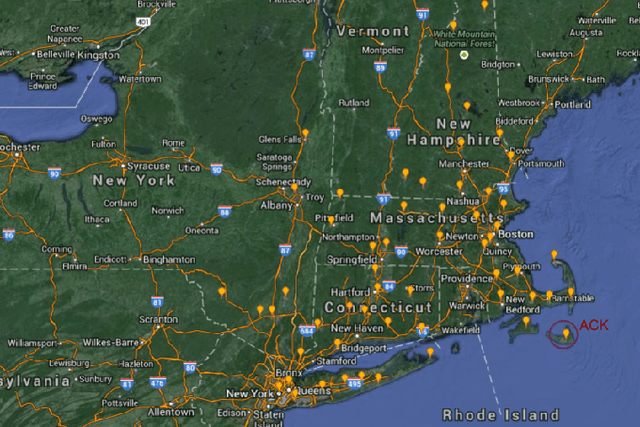
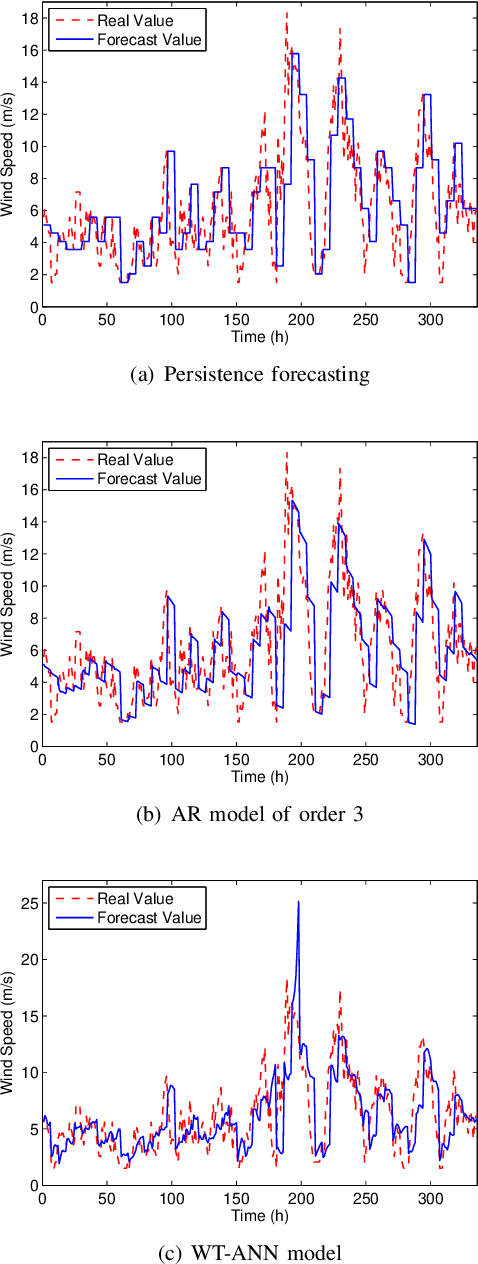
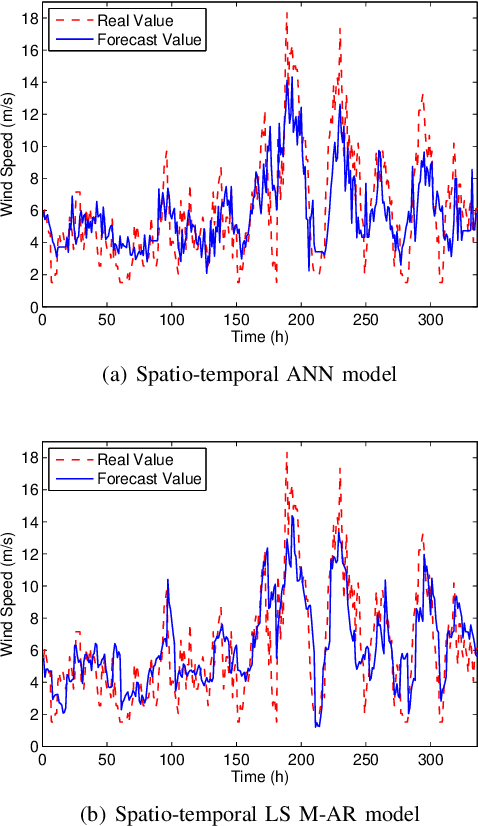
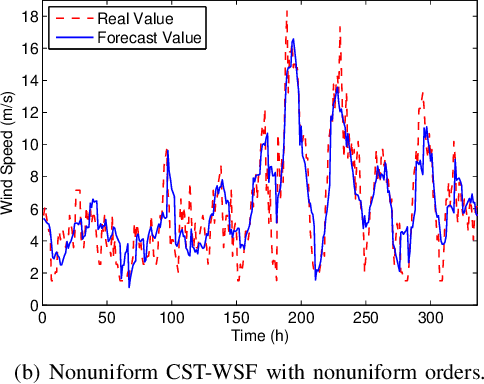
Integrating wind power into the grid is challenging because of its random nature. Integration is facilitated with accurate short-term forecasts of wind power. The paper presents a spatio-temporal wind speed forecasting algorithm that incorporates the time series data of a target station and data of surrounding stations. Inspired by Compressive Sensing (CS) and structured-sparse recovery algorithms, we claim that there usually exists an intrinsic low-dimensional structure governing a large collection of stations that should be exploited. We cast the forecasting problem as recovery of a block-sparse signal $\boldsymbol{x}$ from a set of linear equations $\boldsymbol{b} = A\boldsymbol{x}$ for which we propose novel structure-sparse recovery algorithms. Results of a case study in the east coast show that the proposed Compressive Spatio-Temporal Wind Speed Forecasting (CST-WSF) algorithm significantly improves the short-term forecasts compared to a set of widely-used benchmark models.