 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCongestion Reduction in EV Charger Placement Using Traffic Equilibrium Models
Dec 12, 2025



Growing EV adoption can worsen traffic conditions if chargers are sited without regard to their impact on congestion. We study how to strategically place EV chargers to reduce congestion using two equilibrium models: one based on congestion games and one based on an atomic queueing simulation. We apply both models within a scalable greedy station-placement algorithm. Experiments show that this greedy scheme yields optimal or near-optimal congestion outcomes in realistic networks, even though global optimality is not guaranteed as we show with a counterexample. We also show that the queueing-based approach yields more realistic results than the congestion-game model, and we present a unified methodology that calibrates congestion delays from queue simulation and solves equilibrium in link-space.
Safety Challenges for Autonomous Vehicles in the Absence of Connectivity
Jun 06, 2020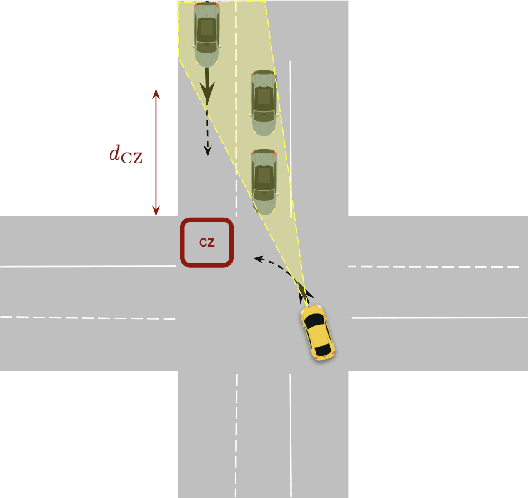

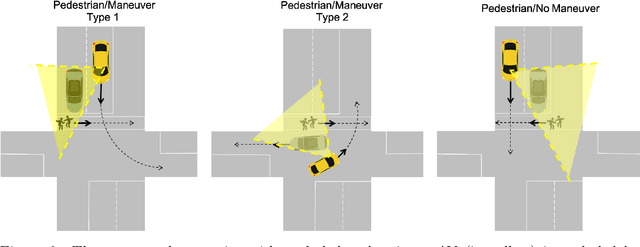
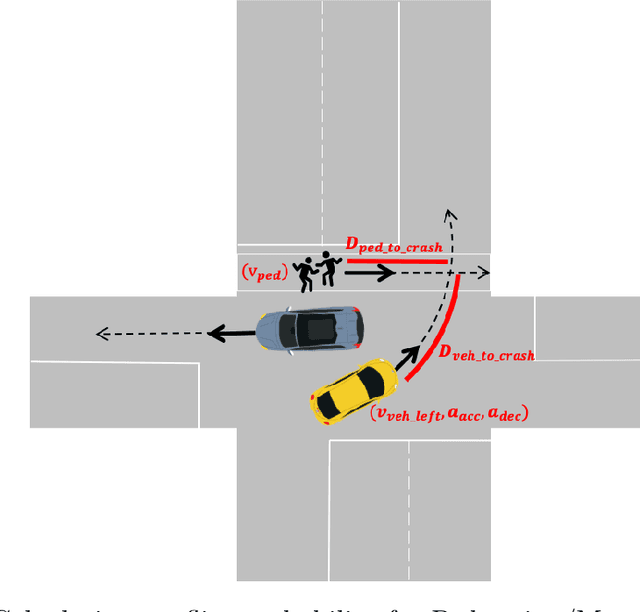
Autonomous vehicles (AVs) are promoted as a technology that will create a future with effortless driving and virtually no traffic accidents. AV companies claim that, when fully developed, the technology will eliminate 94\% of all accidents that are caused by human error. These AVs will likely avoid the large number of crashes caused by impaired, distracted or reckless drivers. But there remains a significant proportion of crashes for which no driver is directly responsible. In particular, the absence of connectivity of an AV with its neighboring vehicles (V2V) and the infrastructure (I2V) leads to a lack of information that can induce such crashes. Since AV designs today do not require such connectivity, these crashes would persist in the future. Using prototypical examples motivated by the NHTSA pre-crash scenario typology, we show that fully autonomous vehicles cannot guarantee safety in the absence of connectivity. Combining theoretical models and empirical data, we also argue that such hazardous scenarios will occur with a significantly high probability. This suggests that incorporating connectivity is an essential step on the path towards safe AV technology.
Making intersections safer with I2V communication
Jan 19, 2019
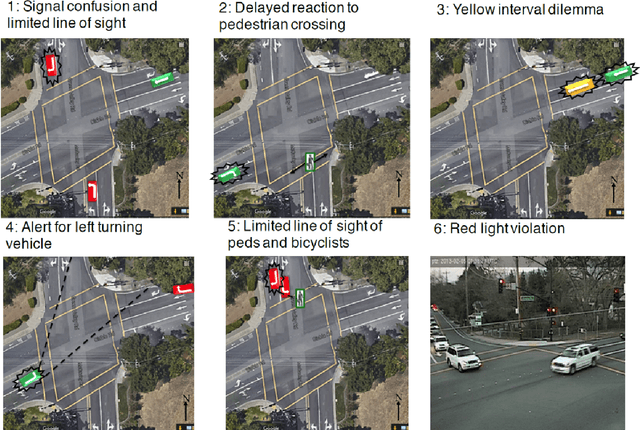
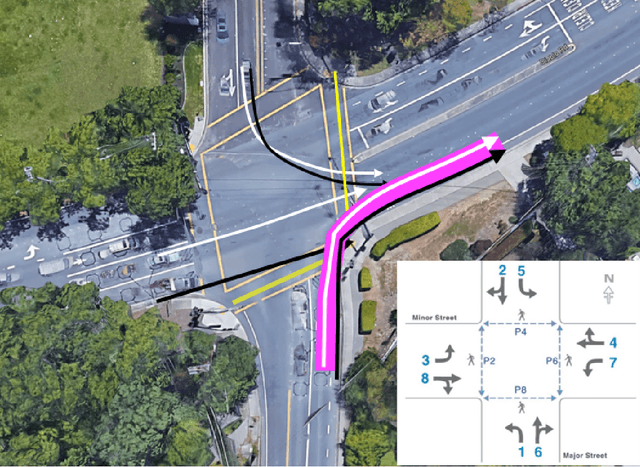
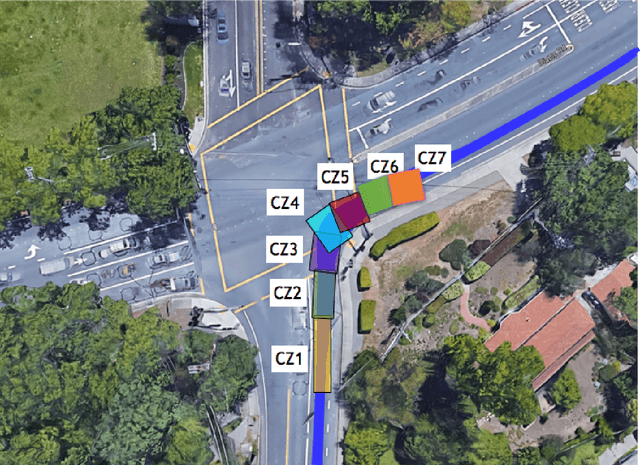
Intersections are hazardous places. Threats arise from interactions among pedestrians, bicycles and vehicles, more complicated vehicle trajectories in the absence of lane markings, phases that prevent determining who has the right of way, invisible vehicle approaches, vehicle obstructions, and illegal movements. These challenges are not fully addressed by the "road diet" and road redesign prescribed in Vision Zero plans, nor will they be completely overcome by autonomous vehicles with their many sensors and tireless attention to surroundings. Accidents can also occur because drivers, cyclists and pedestrians do not have the information they need to avoid wrong decisions. In these cases, the missing information can be computed and broadcast by an intelligent intersection. The information gives the current full signal phase, an estimate of the time when the phase will change, and the occupancy of the blind spots of the driver or autonomous vehicle. The paper develops a design of the intelligent intersection, motivated by the analysis of an accident at an intersection in Tempe, AZ, between an automated Uber Volvo and a manual Honda CRV and culminates in a proposal for an intelligent intersection infrastructure. The intelligent intersection also serves as a software-enabled version of the `protected intersection' design to improve the passage of cyclists and pedestrians through an intersection.