 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClutter Slices Approach for Identification-on-the-fly of Indoor Spaces
Jan 12, 2021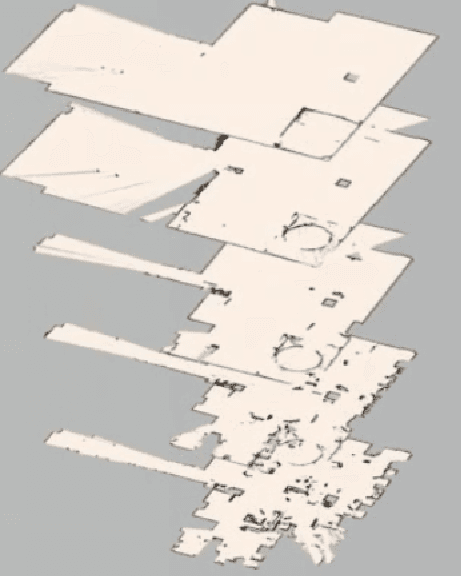
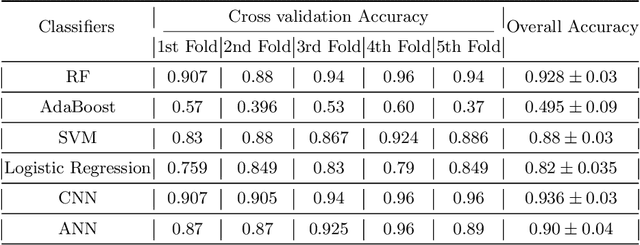
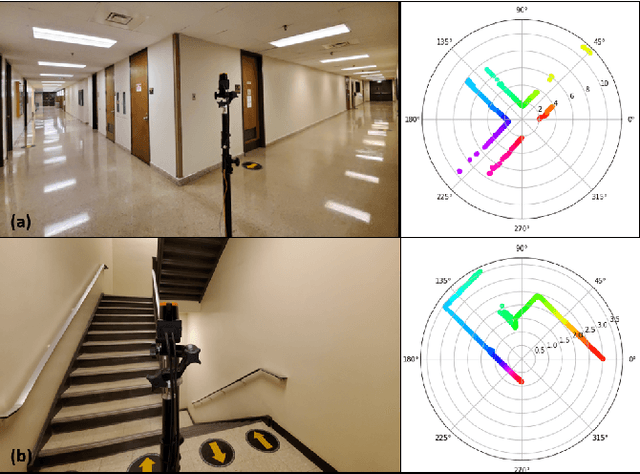
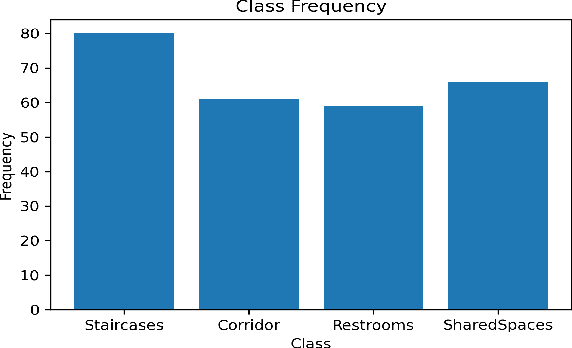
Construction spaces are constantly evolving, dynamic environments in need of continuous surveying, inspection, and assessment. Traditional manual inspection of such spaces proves to be an arduous and time-consuming activity. Automation using robotic agents can be an effective solution. Robots, with perception capabilities can autonomously classify and survey indoor construction spaces. In this paper, we present a novel identification-on-the-fly approach for coarse classification of indoor spaces using the unique signature of clutter. Using the context granted by clutter, we recognize common indoor spaces such as corridors, staircases, shared spaces, and restrooms. The proposed clutter slices pipeline achieves a maximum accuracy of 93.6% on the presented clutter slices dataset. This sensor independent approach can be generalized to various domains to equip intelligent autonomous agents in better perceiving their environment.
* First two authors share equal contribution. Presented at ICPR2020 The 25th International Conference on Pattern Recognition, PRAConBE Workshop