 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePedestrian Trajectory Prediction with Missing Data: Datasets, Imputation, and Benchmarking
Oct 31, 2024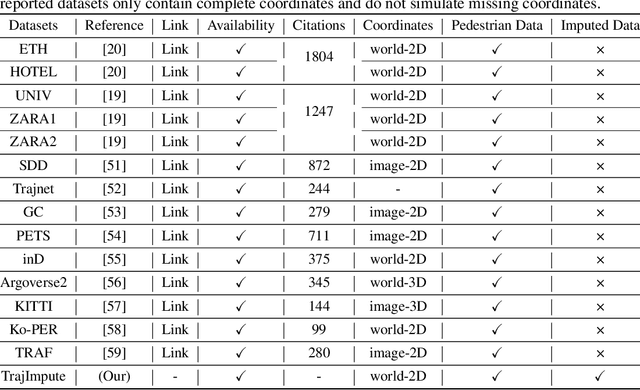
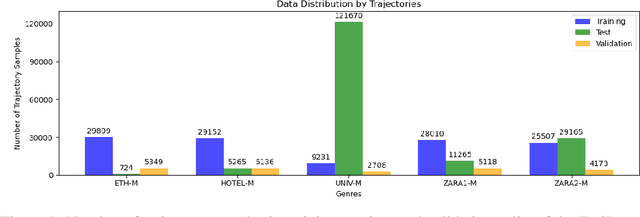
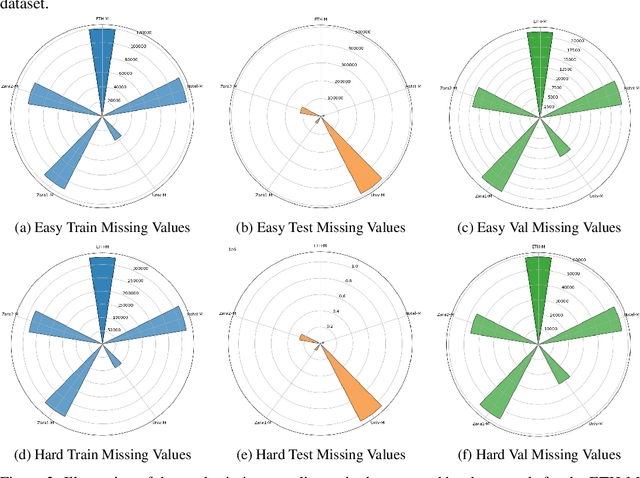
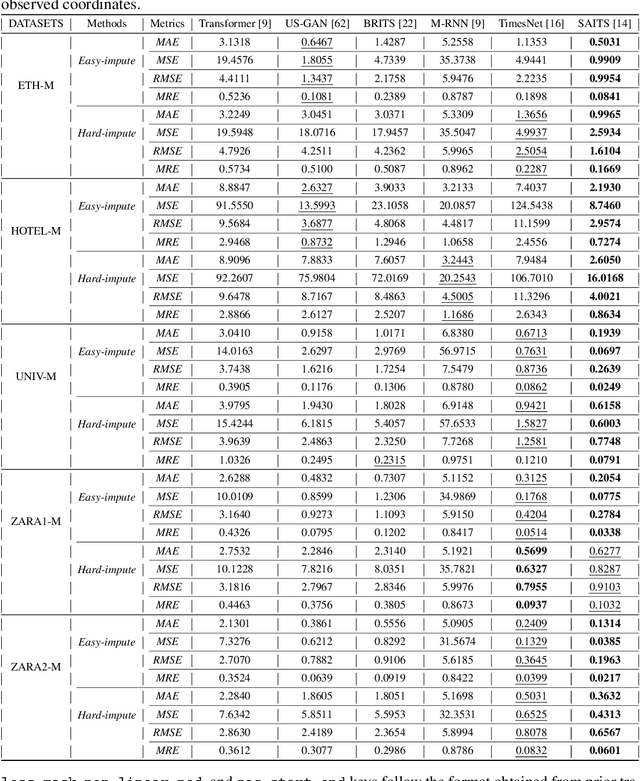
Pedestrian trajectory prediction is crucial for several applications such as robotics and self-driving vehicles. Significant progress has been made in the past decade thanks to the availability of pedestrian trajectory datasets, which enable trajectory prediction methods to learn from pedestrians' past movements and predict future trajectories. However, these datasets and methods typically assume that the observed trajectory sequence is complete, ignoring real-world issues such as sensor failure, occlusion, and limited fields of view that can result in missing values in observed trajectories. To address this challenge, we present TrajImpute, a pedestrian trajectory prediction dataset that simulates missing coordinates in the observed trajectory, enhancing real-world applicability. TrajImpute maintains a uniform distribution of missing data within the observed trajectories. In this work, we comprehensively examine several imputation methods to reconstruct the missing coordinates and benchmark them for imputing pedestrian trajectories. Furthermore, we provide a thorough analysis of recent trajectory prediction methods and evaluate the performance of these models on the imputed trajectories. Our experimental evaluation of the imputation and trajectory prediction methods offers several valuable insights. Our dataset provides a foundational resource for future research on imputation-aware pedestrian trajectory prediction, potentially accelerating the deployment of these methods in real-world applications. Publicly accessible links to the datasets and code files are available at https://github.com/Pranav-chib/TrajImpute.
CCF: Cross Correcting Framework for Pedestrian Trajectory Prediction
Jun 02, 2024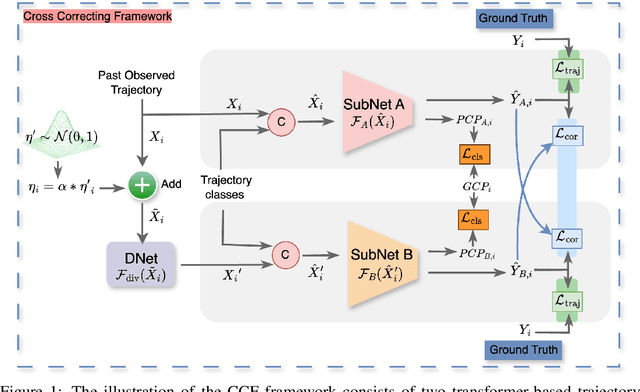



Accurately predicting future pedestrian trajectories is crucial across various domains. Due to the uncertainty in future pedestrian trajectories, it is important to learn complex spatio-temporal representations in multi-agent scenarios. To address this, we propose a novel Cross-Correction Framework (CCF) to learn spatio-temporal representations of pedestrian trajectories better. Our framework consists of two trajectory prediction models, known as subnets, which share the same architecture and are trained with both cross-correction loss and trajectory prediction loss. Cross-correction leverages the learning from both subnets and enables them to refine their underlying representations of trajectories through a mutual correction mechanism. Specifically, we use the cross-correction loss to learn how to correct each other through an inter-subnet interaction. To induce diverse learning among the subnets, we use the transformed observed trajectories produced by a neural network as input to one subnet and the original observed trajectories as input to the other subnet. We utilize transformer-based encoder-decoder architecture for each subnet to capture motion and social interaction among pedestrians. The encoder of the transformer captures motion patterns in trajectories, while the decoder focuses on pedestrian interactions with neighbors. Each subnet performs the primary task of predicting future trajectories (a regression task) along with the secondary task of classifying the predicted trajectories (a classification task). Extensive experiments on real-world benchmark datasets such as ETH-UCY and SDD demonstrate the efficacy of our proposed framework, CCF, in precisely predicting pedestrian future trajectories. We also conducted several ablation experiments to demonstrate the effectiveness of various modules and loss functions used in our approach.
LG-Traj: LLM Guided Pedestrian Trajectory Prediction
Mar 12, 2024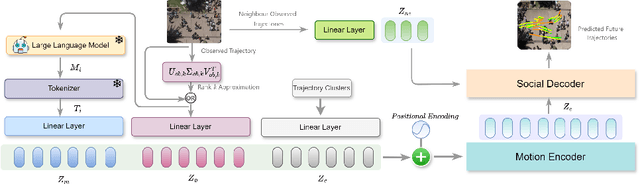

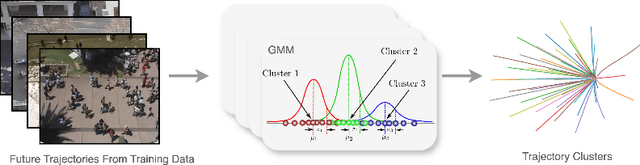

Accurate pedestrian trajectory prediction is crucial for various applications, and it requires a deep understanding of pedestrian motion patterns in dynamic environments. However, existing pedestrian trajectory prediction methods still need more exploration to fully leverage these motion patterns. This paper investigates the possibilities of using Large Language Models (LLMs) to improve pedestrian trajectory prediction tasks by inducing motion cues. We introduce LG-Traj, a novel approach incorporating LLMs to generate motion cues present in pedestrian past/observed trajectories. Our approach also incorporates motion cues present in pedestrian future trajectories by clustering future trajectories of training data using a mixture of Gaussians. These motion cues, along with pedestrian coordinates, facilitate a better understanding of the underlying representation. Furthermore, we utilize singular value decomposition to augment the observed trajectories, incorporating them into the model learning process to further enhance representation learning. Our method employs a transformer-based architecture comprising a motion encoder to model motion patterns and a social decoder to capture social interactions among pedestrians. We demonstrate the effectiveness of our approach on popular pedestrian trajectory prediction benchmarks, namely ETH-UCY and SDD, and present various ablation experiments to validate our approach.
Improving Trajectory Prediction in Dynamic Multi-Agent Environment by Dropping Waypoints
Sep 29, 2023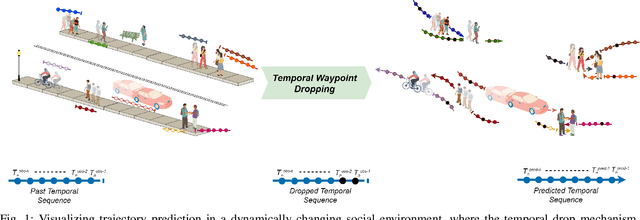
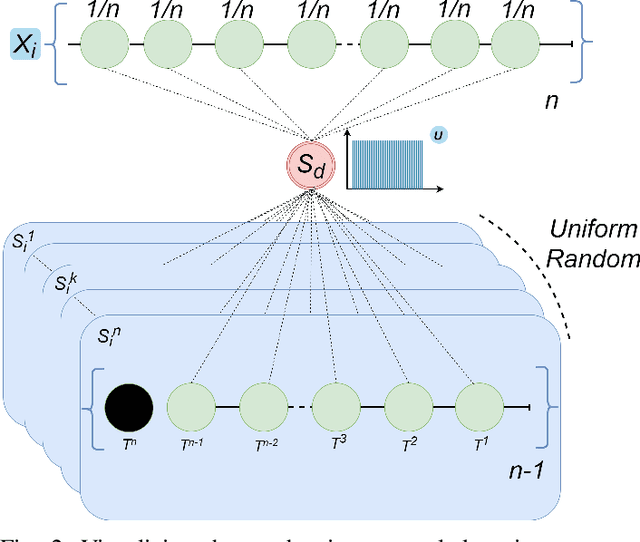
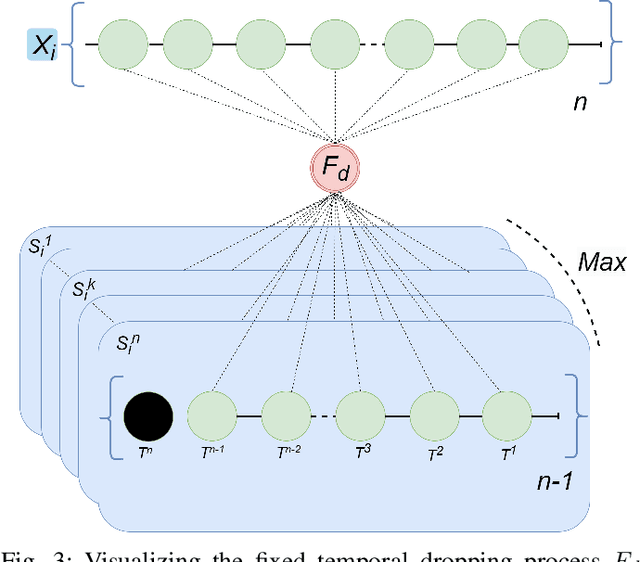
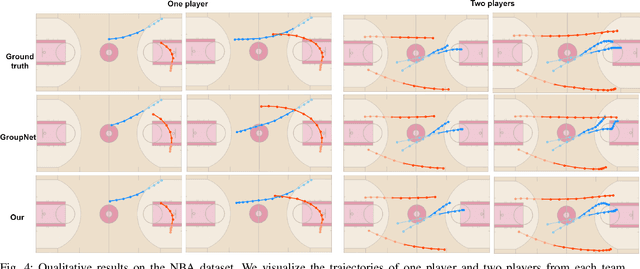
The inherently diverse and uncertain nature of trajectories presents a formidable challenge in accurately modeling them. Motion prediction systems must effectively learn spatial and temporal information from the past to forecast the future trajectories of the agent. Many existing methods learn temporal motion via separate components within stacked models to capture temporal features. This paper introduces a novel framework, called Temporal Waypoint Dropping (TWD), that promotes explicit temporal learning through the waypoint dropping technique. Learning through waypoint dropping can compel the model to improve its understanding of temporal correlations among agents, thus leading to a significant enhancement in trajectory prediction. Trajectory prediction methods often operate under the assumption that observed trajectory waypoint sequences are complete, disregarding real-world scenarios where missing values may occur, which can influence their performance. Moreover, these models frequently exhibit a bias towards particular waypoint sequences when making predictions. Our TWD is capable of effectively addressing these issues. It incorporates stochastic and fixed processes that regularize projected past trajectories by strategically dropping waypoints based on temporal sequences. Through extensive experiments, we demonstrate the effectiveness of TWD in forcing the model to learn complex temporal correlations among agents. Our approach can complement existing trajectory prediction methods to enhance prediction accuracy. We also evaluate our proposed method across three datasets: NBA Sports VU, ETH-UCY, and TrajNet++.
Recent Advancements in End-to-End Autonomous Driving using Deep Learning: A Survey
Jul 10, 2023



End-to-End driving is a promising paradigm as it circumvents the drawbacks associated with modular systems, such as their overwhelming complexity and propensity for error propagation. Autonomous driving transcends conventional traffic patterns by proactively recognizing critical events in advance, ensuring passengers' safety and providing them with comfortable transportation, particularly in highly stochastic and variable traffic settings. This paper presents a comprehensive review of the End-to-End autonomous driving stack. It provides a taxonomy of automated driving tasks wherein neural networks have been employed in an End-to-End manner, encompassing the entire driving process from perception to control, while addressing key challenges encountered in real-world applications. Recent developments in End-to-End autonomous driving are analyzed, and research is categorized based on underlying principles, methodologies, and core functionality. These categories encompass sensorial input, main and auxiliary output, learning approaches ranging from imitation to reinforcement learning, and model evaluation techniques. The survey incorporates a detailed discussion of the explainability and safety aspects. Furthermore, it assesses the state-of-the-art, identifies challenges, and explores future possibilities. We maintained the latest advancements and their corresponding open-source implementations at https://github.com/Pranav-chib/Recent-Advancements-in-End-to-End-Autonomous-Driving-using-Deep-Learning.