 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLG-Traj: LLM Guided Pedestrian Trajectory Prediction
Paper and Code
Mar 12, 2024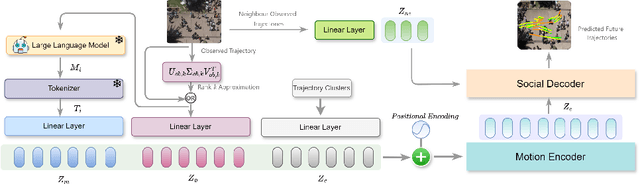

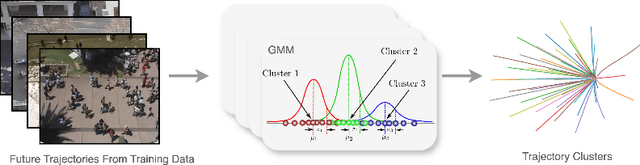

Accurate pedestrian trajectory prediction is crucial for various applications, and it requires a deep understanding of pedestrian motion patterns in dynamic environments. However, existing pedestrian trajectory prediction methods still need more exploration to fully leverage these motion patterns. This paper investigates the possibilities of using Large Language Models (LLMs) to improve pedestrian trajectory prediction tasks by inducing motion cues. We introduce LG-Traj, a novel approach incorporating LLMs to generate motion cues present in pedestrian past/observed trajectories. Our approach also incorporates motion cues present in pedestrian future trajectories by clustering future trajectories of training data using a mixture of Gaussians. These motion cues, along with pedestrian coordinates, facilitate a better understanding of the underlying representation. Furthermore, we utilize singular value decomposition to augment the observed trajectories, incorporating them into the model learning process to further enhance representation learning. Our method employs a transformer-based architecture comprising a motion encoder to model motion patterns and a social decoder to capture social interactions among pedestrians. We demonstrate the effectiveness of our approach on popular pedestrian trajectory prediction benchmarks, namely ETH-UCY and SDD, and present various ablation experiments to validate our approach.