 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFALCON: Learning Force-Adaptive Humanoid Loco-Manipulation
May 10, 2025Humanoid loco-manipulation holds transformative potential for daily service and industrial tasks, yet achieving precise, robust whole-body control with 3D end-effector force interaction remains a major challenge. Prior approaches are often limited to lightweight tasks or quadrupedal/wheeled platforms. To overcome these limitations, we propose FALCON, a dual-agent reinforcement-learning-based framework for robust force-adaptive humanoid loco-manipulation. FALCON decomposes whole-body control into two specialized agents: (1) a lower-body agent ensuring stable locomotion under external force disturbances, and (2) an upper-body agent precisely tracking end-effector positions with implicit adaptive force compensation. These two agents are jointly trained in simulation with a force curriculum that progressively escalates the magnitude of external force exerted on the end effector while respecting torque limits. Experiments demonstrate that, compared to the baselines, FALCON achieves 2x more accurate upper-body joint tracking, while maintaining robust locomotion under force disturbances and achieving faster training convergence. Moreover, FALCON enables policy training without embodiment-specific reward or curriculum tuning. Using the same training setup, we obtain policies that are deployed across multiple humanoids, enabling forceful loco-manipulation tasks such as transporting payloads (0-20N force), cart-pulling (0-100N), and door-opening (0-40N) in the real world.
SAGA: Semantic-Aware Gray color Augmentation for Visible-to-Thermal Domain Adaptation across Multi-View Drone and Ground-Based Vision Systems
Apr 22, 2025Domain-adaptive thermal object detection plays a key role in facilitating visible (RGB)-to-thermal (IR) adaptation by reducing the need for co-registered image pairs and minimizing reliance on large annotated IR datasets. However, inherent limitations of IR images, such as the lack of color and texture cues, pose challenges for RGB-trained models, leading to increased false positives and poor-quality pseudo-labels. To address this, we propose Semantic-Aware Gray color Augmentation (SAGA), a novel strategy for mitigating color bias and bridging the domain gap by extracting object-level features relevant to IR images. Additionally, to validate the proposed SAGA for drone imagery, we introduce the IndraEye, a multi-sensor (RGB-IR) dataset designed for diverse applications. The dataset contains 5,612 images with 145,666 instances, captured from diverse angles, altitudes, backgrounds, and times of day, offering valuable opportunities for multimodal learning, domain adaptation for object detection and segmentation, and exploration of sensor-specific strengths and weaknesses. IndraEye aims to enhance the development of more robust and accurate aerial perception systems, especially in challenging environments. Experimental results show that SAGA significantly improves RGB-to-IR adaptation for autonomous driving and IndraEye dataset, achieving consistent performance gains of +0.4% to +7.6% (mAP) when integrated with state-of-the-art domain adaptation techniques. The dataset and codes are available at https://github.com/airliisc/IndraEye.
IndraEye: Infrared Electro-Optical UAV-based Perception Dataset for Robust Downstream Tasks
Oct 28, 2024Deep neural networks (DNNs) have shown exceptional performance when trained on well-illuminated images captured by Electro-Optical (EO) cameras, which provide rich texture details. However, in critical applications like aerial perception, it is essential for DNNs to maintain consistent reliability across all conditions, including low-light scenarios where EO cameras often struggle to capture sufficient detail. Additionally, UAV-based aerial object detection faces significant challenges due to scale variability from varying altitudes and slant angles, adding another layer of complexity. Existing methods typically address only illumination changes or style variations as domain shifts, but in aerial perception, correlation shifts also impact DNN performance. In this paper, we introduce the IndraEye dataset, a multi-sensor (EO-IR) dataset designed for various tasks. It includes 5,612 images with 145,666 instances, encompassing multiple viewing angles, altitudes, seven backgrounds, and different times of the day across the Indian subcontinent. The dataset opens up several research opportunities, such as multimodal learning, domain adaptation for object detection and segmentation, and exploration of sensor-specific strengths and weaknesses. IndraEye aims to advance the field by supporting the development of more robust and accurate aerial perception systems, particularly in challenging conditions. IndraEye dataset is benchmarked with object detection and semantic segmentation tasks. Dataset and source codes are available at https://bit.ly/indraeye.
MRFP: Learning Generalizable Semantic Segmentation from Sim-2-Real with Multi-Resolution Feature Perturbation
Nov 30, 2023
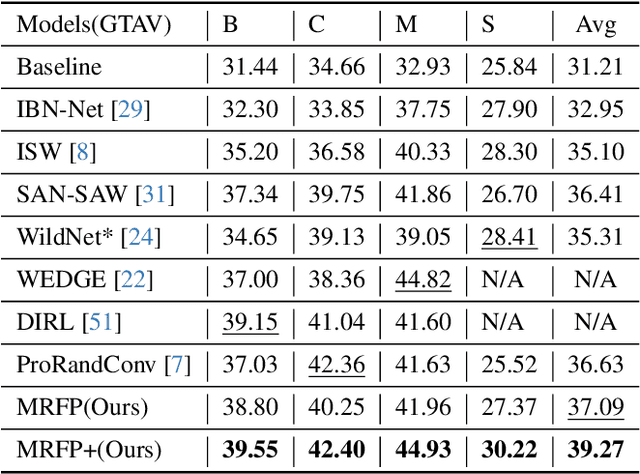
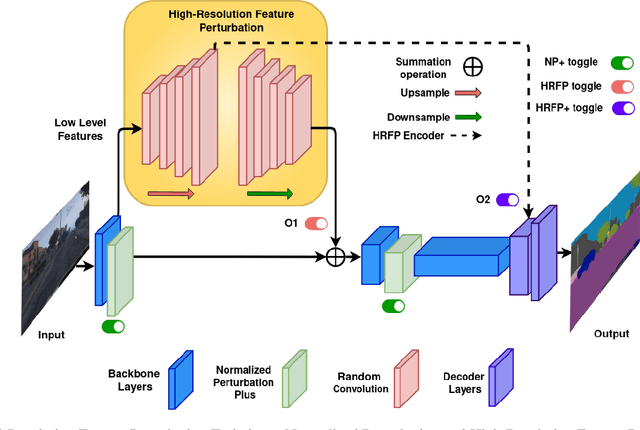
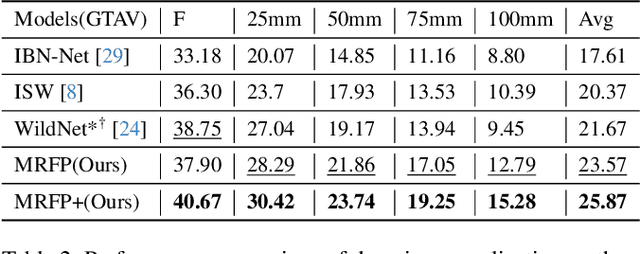
Deep neural networks have shown exemplary performance on semantic scene understanding tasks on source domains, but due to the absence of style diversity during training, enhancing performance on unseen target domains using only single source domain data remains a challenging task. Generation of simulated data is a feasible alternative to retrieving large style-diverse real-world datasets as it is a cumbersome and budget-intensive process. However, the large domain-specific inconsistencies between simulated and real-world data pose a significant generalization challenge in semantic segmentation. In this work, to alleviate this problem, we propose a novel MultiResolution Feature Perturbation (MRFP) technique to randomize domain-specific fine-grained features and perturb style of coarse features. Our experimental results on various urban-scene segmentation datasets clearly indicate that, along with the perturbation of style-information, perturbation of fine-feature components is paramount to learn domain invariant robust feature maps for semantic segmentation models. MRFP is a simple and computationally efficient, transferable module with no additional learnable parameters or objective functions, that helps state-of-the-art deep neural networks to learn robust domain invariant features for simulation-to-real semantic segmentation.